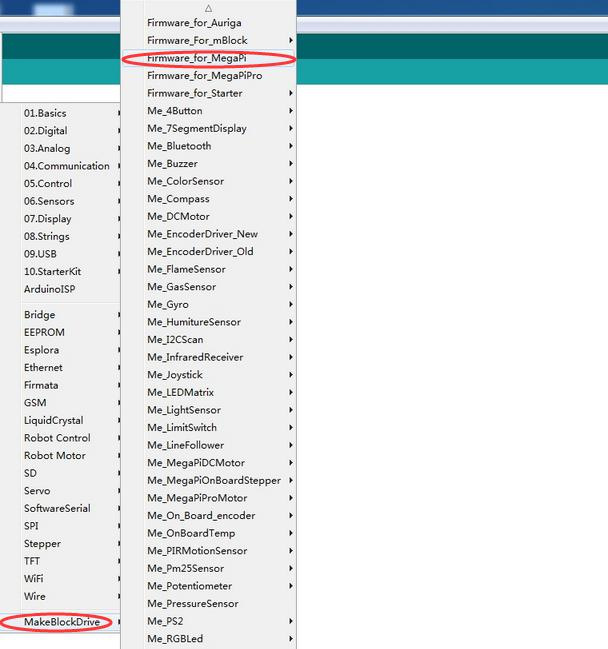
The Arduino IDE does not require the functions to be pre-stated. It seams that C++ does. You have chosen after variable definition and before the first function. (line 251). I have literally chosen the line before the first function. (line 267). It amounts to about the same thing. But I am using an edited version of "Firmware_for_MegaPi.ino" 3.2.6! I am not sure that you are. Thank you.
That post was long enough. It was time for a break.
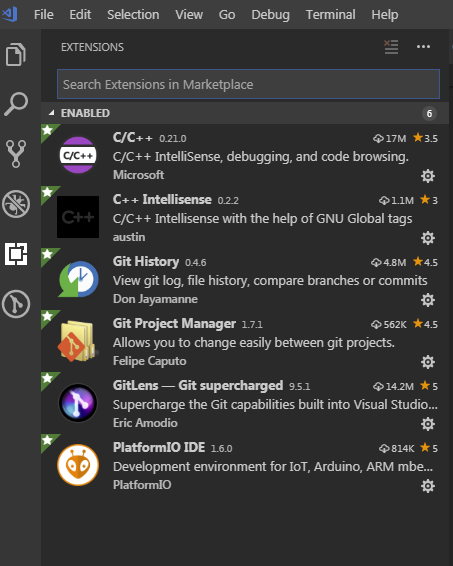
I may have a new issue. I have encountered Visual Studio extension conflicts(messages). So, some have been uninstalled and other installed. There may be a magic combination that works best. In my current install (as shone) most of the PlatformIO icons at the bottom of the screen do not show.

To get them back, I do a . . .
View > Command Palette… > PlatformIO: Rebuild IntelliSence Index
or
View > Command Palette… > PlatformIO: Build
The response that I get is
Activating extensions
And all the icons come back.
I have removed all of the "PROBLEMS" but get the one error message. I a including all of the TERMINAL text here.
Body is limited to 32000 characters; you entered 34809.
i will include what i can
>
> <artificial>:(.text.startup+0x26a): undefined reference to `MeEncoderOnBoard::setPosPid(float, float, float)'
>
> <artificial>:(.text.startup+0x284): undefined reference to `MeEncoderOnBoard::setSpeedPid(float, float, float)'
>
> <artificial>:(.text.startup+0x298): undefined reference to `MeEncoderOnBoard::setSpeedPid(float, float, float)'
>
> <artificial>:(.text.startup+0x2ac): undefined reference to `MeEncoderOnBoard::setSpeedPid(float, float, float)'
>
> <artificial>:(.text.startup+0x2c0): undefined reference to `MeEncoderOnBoard::setSpeedPid(float, float, float)'
>
> <artificial>:(.text.startup+0x2cc): undefined reference to `MeEncoderOnBoard::setMotionMode(int)'
>
> <artificial>:(.text.startup+0x2d8): undefined reference to `MeEncoderOnBoard::setMotionMode(int)'
>
> <artificial>:(.text.startup+0x2e4): undefined reference to `MeEncoderOnBoard::setMotionMode(int)'
>
> <artificial>:(.text.startup+0x2f0): undefined reference to `MeEncoderOnBoard::setMotionMode(int)'
>
> <artificial>:(.text.startup+0x908): undefined reference to `Me4Button::pressed()'
>
> <artificial>:(.text.startup+0x980): undefined reference to `MeInfraredReceiver::loop()'
>
> <artificial>:(.text.startup+0x98c): undefined reference to `MeInfraredReceiver::getCode()'
>
> <artificial>:(.text.startup+0xa5c): undefined reference to `MeInfraredReceiver::buttonState()'
>
> <artificial>:(.text.startup+0xa6c): undefined reference to `MeInfraredReceiver::loop()'
>
> <artificial>:(.text.startup+0xa90): undefined reference to `MeStepperOnBoard::getPort()'
>
> <artificial>:(.text.startup+0xaa2): undefined reference to `MeStepperOnBoard::getPort()'
>
> <artificial>:(.text.startup+0xab4): undefined reference to `MeStepperOnBoard::getPort()'
>
> <artificial>:(.text.startup+0xac6): undefined reference to `MeStepperOnBoard::getPort()'
>
> <artificial>:(.text.startup+0xad2): undefined reference to `MeStepperOnBoard::update()'
>
> <artificial>:(.text.startup+0xada): undefined reference to `MeEncoderOnBoard::loop()'
>
> <artificial>:(.text.startup+0xae2): undefined reference to `MeEncoderOnBoard::loop()'
>
> <artificial>:(.text.startup+0xaea): undefined reference to `MeEncoderOnBoard::loop()'
>
> <artificial>:(.text.startup+0xaf2): undefined reference to `MeEncoderOnBoard::loop()'
>
> <artificial>:(.text.startup+0x12da): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text.startup+0x12e6): undefined reference to `MeCompass::getAngle()'
>
> <artificial>:(.text.startup+0x12ee): undefined reference to `MeGyro::getGyroY()'
>
> <artificial>:(.text.startup+0x134c): undefined reference to `MeGyro::fast_update()'
>
> <artificial>:(.text.startup+0x1370): undefined reference to `MeUltrasonicSensor::MeUltrasonicSensor(unsigned char)'
>
> <artificial>:(.text.startup+0x139a): undefined reference to `MeUltrasonicSensor::distanceCm(unsigned int)'
>
> <artificial>:(.text.startup+0x1424): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x1434): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x1464): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x1484): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x14bc): undefined reference to `MeGyro::fast_update()'
>
> <artificial>:(.text.startup+0x14e4): undefined reference to `MeGyro::getAngleX()'
>
> <artificial>:(.text.startup+0x1512): undefined reference to `MeGyro::getAngleX()'
>
> <artificial>:(.text.startup+0x154e): undefined reference to `MeGyro::getAngleX()'
>
> <artificial>:(.text.startup+0x157c): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x1588): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x15e6): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> <artificial>:(.text.startup+0x15f4): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> <artificial>:(.text.startup+0x1660): undefined reference to `MeGyro::getAngleX()'
>
> <artificial>:(.text.startup+0x1ab2): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x1ac2): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x1b16): undefined reference to `MeEncoderOnBoard::getCurrentSpeed()'
>
> <artificial>:(.text.startup+0x1b22): undefined reference to `MeEncoderOnBoard::getCurrentSpeed()'
>
> <artificial>:(.text.startup+0x1fb6): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x1fca): undefined reference to `MeLineFollower::readSensors()'
>
> <artificial>:(.text.startup+0x2054): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x2064): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x2086): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x209c): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text.startup+0x214c): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans0.ltrans.o:<artificial>:(.text.startup+0x2158): more undefined references to `MeEncoderOnBoard::setMotorPwm(int)' follow
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans0.ltrans.o: In function `main':
>
> <artificial>:(.text.startup+0x2186): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> <artificial>:(.text.startup+0x2194): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o: In function `isr_process_encoder4()':
>
> <artificial>:(.text+0x30): undefined reference to `MeEncoderOnBoard::getPortB()'
>
> <artificial>:(.text+0x40): undefined reference to `MeEncoderOnBoard::pulsePosMinus()'
>
> <artificial>:(.text+0x48): undefined reference to `MeEncoderOnBoard::pulsePosPlus()'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o: In function `isr_process_encoder3()':
>
> <artificial>:(.text+0x50): undefined reference to `MeEncoderOnBoard::getPortB()'
>
> <artificial>:(.text+0x60): undefined reference to `MeEncoderOnBoard::pulsePosMinus()'
>
> <artificial>:(.text+0x68): undefined reference to `MeEncoderOnBoard::pulsePosPlus()'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o: In function `isr_process_encoder2()':
>
> <artificial>:(.text+0x70): undefined reference to `MeEncoderOnBoard::getPortB()'
>
> <artificial>:(.text+0x80): undefined reference to `MeEncoderOnBoard::pulsePosMinus()'
>
> <artificial>:(.text+0x88): undefined reference to `MeEncoderOnBoard::pulsePosPlus()'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o: In function `isr_process_encoder1()':
>
> <artificial>:(.text+0x90): undefined reference to `MeEncoderOnBoard::getPortB()'
>
> <artificial>:(.text+0xa0): undefined reference to `MeEncoderOnBoard::pulsePosMinus()'
>
> <artificial>:(.text+0xa8): undefined reference to `MeEncoderOnBoard::pulsePosPlus()'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o: In function `Stop()':
>
> <artificial>:(.text+0x262): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text+0x26e): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o: In function `TurnRight()':
>
> <artificial>:(.text+0x28a): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text+0x2a0): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o: In function `TurnLeft()':
>
> <artificial>:(.text+0x2b0): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o:<artificial>:(.text+0x2d2): more undefined references to `MeEncoderOnBoard::setMotorPwm(int)' follow
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans1.ltrans.o: In function `parseData()':
>
> <artificial>:(.text+0x3c2): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x3e2): undefined reference to `MeUltrasonicSensor::MeUltrasonicSensor(unsigned char)'
>
> <artificial>:(.text+0x3fa): undefined reference to `MeUltrasonicSensor::distanceCm(unsigned int)'
>
> <artificial>:(.text+0x422): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x42e): undefined reference to `MePort::getSlot()'
>
> <artificial>:(.text+0x43a): undefined reference to `MeTemperature::temperature()'
>
> <artificial>:(.text+0x444): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x452): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x45a): undefined reference to `MePort::pin2()'
>
> <artificial>:(.text+0x468): undefined reference to `MePort::aRead2()'
>
> <artificial>:(.text+0x47c): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x48a): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x494): undefined reference to `MeJoystick::read(unsigned char)'
>
> <artificial>:(.text+0x4a8): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x4be): undefined reference to `vtable for MeSerial'
>
> <artificial>:(.text+0x4c0): undefined reference to `vtable for MeSerial'
>
> <artificial>:(.text+0x518): undefined reference to `MeInfraredReceiver::MeInfraredReceiver(unsigned char)'
>
> <artificial>:(.text+0x526): undefined reference to `MeInfraredReceiver::begin()'
>
> <artificial>:(.text+0x532): undefined reference to `MeInfraredReceiver::getCode()'
>
> <artificial>:(.text+0x546): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x554): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x55c): undefined reference to `MePort::pin2()'
>
> <artificial>:(.text+0x56c): undefined reference to `MePort::dRead2(unsigned char)'
>
> <artificial>:(.text+0x576): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x584): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x58c): undefined reference to `MePort::pin1()'
>
> <artificial>:(.text+0x59a): undefined reference to `MePort::pin2()'
>
> <artificial>:(.text+0x5aa): undefined reference to `MePort::dRead1(unsigned char)'
>
> <artificial>:(.text+0x5b6): undefined reference to `MePort::dRead2(unsigned char)'
>
> <artificial>:(.text+0x5d6): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x5e2): undefined reference to `MePort::getSlot()'
>
> <artificial>:(.text+0x5f2): undefined reference to `MePort::pin1()'
>
> <artificial>:(.text+0x602): undefined reference to `MePort::dRead1(unsigned char)'
>
> <artificial>:(.text+0x60a): undefined reference to `MePort::pin2()'
>
> <artificial>:(.text+0x61a): undefined reference to `MePort::dRead2(unsigned char)'
>
> <artificial>:(.text+0x634): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x642): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x64a): undefined reference to `MePort::pin2()'
>
> <artificial>:(.text+0x654): undefined reference to `MePort::pin1()'
>
> <artificial>:(.text+0x660): undefined reference to `MeCompass::setpin(unsigned char, unsigned char)'
>
> <artificial>:(.text+0x668): undefined reference to `MeCompass::getAngle()'
>
> <artificial>:(.text+0x67c): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x68a): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x692): undefined reference to `MeHumiture::update()'
>
> <artificial>:(.text+0x69c): undefined reference to `MeHumiture::getValue(unsigned char)'
>
> <artificial>:(.text+0x6b6): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x6c4): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x6cc): undefined reference to `MePort::pin1()'
>
> <artificial>:(.text+0x6d6): undefined reference to `MePort::pin2()'
>
> <artificial>:(.text+0x6e2): undefined reference to `MeFlameSensor::setpin(unsigned char, unsigned char)'
>
> <artificial>:(.text+0x6ea): undefined reference to `MeFlameSensor::readAnalog()'
>
> <artificial>:(.text+0x6f4): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x702): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x70a): undefined reference to `MePort::pin1()'
>
> <artificial>:(.text+0x714): undefined reference to `MePort::pin2()'
>
> <artificial>:(.text+0x720): undefined reference to `MeGasSensor::setpin(unsigned char, unsigned char)'
>
> <artificial>:(.text+0x728): undefined reference to `MeGasSensor::readAnalog()'
>
> <artificial>:(.text+0x744): undefined reference to `MeGyro::getDevAddr()'
>
> <artificial>:(.text+0x91a): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x928): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x930): undefined reference to `MeTouchSensor::touched()'
>
> <artificial>:(.text+0x93a): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x948): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x9d0): undefined reference to `MeEncoderOnBoard::getCurPos()'
>
> <artificial>:(.text+0x9e2): undefined reference to `MeEncoderOnBoard::getCurrentSpeed()'
>
> <artificial>:(.text+0xa14): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> <artificial>:(.text+0xa22): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> <artificial>:(.text+0xa30): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> <artificial>:(.text+0xa3e): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> <artificial>:(.text+0xa5c): undefined reference to `MeEncoderOnBoard::moveTo(long, float, int, void (*)(int, int))'
>
> <artificial>:(.text+0xa72): undefined reference to `MeEncoderOnBoard::moveTo(long, float, int, void (*)(int, int))'
>
> <artificial>:(.text+0xa88): undefined reference to `MeEncoderOnBoard::moveTo(long, float, int, void (*)(int, int))'
>
> <artificial>:(.text+0xa9e): undefined reference to `MeEncoderOnBoard::moveTo(long, float, int, void (*)(int, int))'
>
> <artificial>:(.text+0xaaa): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text+0xab6): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text+0xac2): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text+0xace): undefined reference to `MeEncoderOnBoard::setMotorPwm(int)'
>
> <artificial>:(.text+0xada): undefined reference to `MeEncoderOnBoard::setMotionMode(int)'
>
> <artificial>:(.text+0xae6): undefined reference to `MeEncoderOnBoard::setMotionMode(int)'
>
> <artificial>:(.text+0xaf2): undefined reference to `MeEncoderOnBoard::setMotionMode(int)'
>
> <artificial>:(.text+0xafe): undefined reference to `MeEncoderOnBoard::setMotionMode(int)'
>
> <artificial>:(.text+0xb08): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0xb14): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0xb1e): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0xb2a): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0xb34): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0xb40): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0xb4a): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0xb56): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0xb60): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0xb6c): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0xb76): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0xb82): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0xb8c): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0xb98): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0xba2): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0xbae): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0xbbc): undefined reference to `MeStepperOnBoard::setCurrentPosition(long)'
>
> <artificial>:(.text+0xbca): undefined reference to `MeStepperOnBoard::setCurrentPosition(long)'
>
> <artificial>:(.text+0xbd8): undefined reference to `MeStepperOnBoard::setCurrentPosition(long)'
>
> <artificial>:(.text+0xbe6): undefined reference to `MeStepperOnBoard::setCurrentPosition(long)'
>
> <artificial>:(.text+0xbf4): undefined reference to `MeStepperOnBoard::moveTo(long)'
>
> <artificial>:(.text+0xc02): undefined reference to `MeStepperOnBoard::moveTo(long)'
>
> <artificial>:(.text+0xc10): undefined reference to `MeStepperOnBoard::moveTo(long)'
>
> <artificial>:(.text+0xc1e): undefined reference to `MeStepperOnBoard::moveTo(long)'
>
> <artificial>:(.text+0xc26): undefined reference to `MeStepperOnBoard::disableOutputs()'
>
> <artificial>:(.text+0xc2e): undefined reference to `MeStepperOnBoard::disableOutputs()'
>
> <artificial>:(.text+0xc36): undefined reference to `MeStepperOnBoard::disableOutputs()'
>
> <artificial>:(.text+0xc3e): undefined reference to `MeStepperOnBoard::disableOutputs()'
>
> <artificial>:(.text+0xc50): undefined reference to `MeTemperature::reset(unsigned char, unsigned char)'
>
> <artificial>:(.text+0xc5e): undefined reference to `MePort::reset(unsigned char, unsigned char)'
>
> <artificial>:(.text+0xc6a): undefined reference to `MeGyro::getAngle(unsigned char)'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans2.ltrans.o: In function `initStepper(unsigned char, int)':
>
> <artificial>:(.text+0xc0): undefined reference to `MeStepperOnBoard::setMaxSpeed(float)'
>
> <artificial>:(.text+0xce): undefined reference to `MeStepperOnBoard::setAcceleration(float)'
>
> <artificial>:(.text+0xd6): undefined reference to `MeStepperOnBoard::setMicroStep(signed char)'
>
> <artificial>:(.text+0xe0): undefined reference to `MeStepperOnBoard::setSpeed(float)'
>
> <artificial>:(.text+0xf2): undefined reference to `MeStepperOnBoard::enableOutputs()'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans2.ltrans.o: In function `runModule(unsigned char)':
>
> <artificial>:(.text+0x204): undefined reference to `MeMegaPiDCMotor::reset(unsigned char)'
>
> <artificial>:(.text+0x20e): undefined reference to `MeMegaPiDCMotor::run(int)'
>
> <artificial>:(.text+0x240): undefined reference to `MeEncoderOnBoard::setTarPWM(int)'
>
> <artificial>:(.text+0x268): undefined reference to `MeEncoderOnBoard::setTarPWM(int)'
>
> <artificial>:(.text+0x2b8): undefined reference to `MeStepperOnBoard::MeStepperOnBoard(int)'
>
> <artificial>:(.text+0x302): undefined reference to `MeStepperOnBoard::move(long, int, void (*)(int, int))'
>
> <artificial>:(.text+0x320): undefined reference to `MeStepperOnBoard::MeStepperOnBoard(int)'
>
> <artificial>:(.text+0x364): undefined reference to `MeStepperOnBoard::setSpeed(float)'
>
> <artificial>:(.text+0x390): undefined reference to `MeStepperOnBoard::MeStepperOnBoard(int)'
>
> <artificial>:(.text+0x3da): undefined reference to `MeStepperOnBoard::moveTo(long, int, void (*)(int, int))'
>
> <artificial>:(.text+0x3ee): undefined reference to `MeStepperOnBoard::MeStepperOnBoard(int)'
>
> <artificial>:(.text+0x41c): undefined reference to `MeStepperOnBoard::setCurrentPosition(long)'
>
> <artificial>:(.text+0x440): undefined reference to `MeStepperOnBoard::MeStepperOnBoard(int)'
>
> <artificial>:(.text+0x462): undefined reference to `MeStepperOnBoard::moveTo(long)'
>
> <artificial>:(.text+0x49e): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x4aa): undefined reference to `MePort::getSlot()'
>
> <artificial>:(.text+0x4c2): undefined reference to `MeRGBLed::setColorAt(unsigned char, unsigned char, unsigned char, unsigned char)'
>
> <artificial>:(.text+0x4d2): undefined reference to `MeRGBLed::setColor(unsigned char, unsigned char, unsigned char)'
>
> <artificial>:(.text+0x4da): undefined reference to `MeRGBLed::show()'
>
> <artificial>:(.text+0x5d4): undefined reference to `Servo::attached()'
>
> <artificial>:(.text+0x5e2): undefined reference to `Servo::attach(int)'
>
> <artificial>:(.text+0x5ee): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x5fc): undefined reference to `Me7SegmentDisplay::reset(unsigned char)'
>
> <artificial>:(.text+0x610): undefined reference to `Me7SegmentDisplay::display(float)'
>
> <artificial>:(.text+0x61a): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x628): undefined reference to `MeLEDMatrix::reset(unsigned char)'
>
> <artificial>:(.text+0x69a): undefined reference to `MeLEDMatrix::drawStr(int, signed char, char const*)'
>
> <artificial>:(.text+0x6e8): undefined reference to `MeLEDMatrix::drawBitmap(signed char, signed char, unsigned char, unsigned char*)'
>
> <artificial>:(.text+0x71e): undefined reference to `MeLEDMatrix::showClock(unsigned char, unsigned char, bool)'
>
> <artificial>:(.text+0x73c): undefined reference to `MeLEDMatrix::showNum(float, unsigned char)'
>
> <artificial>:(.text+0x746): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x754): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x76e): undefined reference to `MePort::getPort()'
>
> <artificial>:(.text+0x77c): undefined reference to `MePort::reset(unsigned char)'
>
> <artificial>:(.text+0x794): undefined reference to `MePort::dWrite1(bool)'
>
> <artificial>:(.text+0x7a6): undefined reference to `MePort::dWrite2(bool)'
>
> <artificial>:(.text+0x9c0): undefined reference to `Servo::attached()'
>
> <artificial>:(.text+0x9ce): undefined reference to `Servo::attach(int)'
>
> <artificial>:(.text+0x9da): undefined reference to `Servo::write(int)'
>
> <artificial>:(.text+0xc62): undefined reference to `MeEncoderOnBoard::moveTo(long, float, int, void (*)(int, int))'
>
> <artificial>:(.text+0xcdc): undefined reference to `MeEncoderOnBoard::runSpeed(float)'
>
> <artificial>:(.text+0xd5a): undefined reference to `MeEncoderOnBoard::setPulsePos(long)'
>
> <artificial>:(.text+0xda2): undefined reference to `MeEncoderOnBoard::move(long, float, int, void (*)(int, int))'
>
> <artificial>:(.text+0xe3a): undefined reference to `MeEncoderOnBoard::move(long, float, int, void (*)(int, int))'
>
> <artificial>:(.text+0xe4a): undefined reference to `MeEncoderOnBoard::move(long, float, int, void (*)(int, int))'
>
> <artificial>:(.text+0xee4): undefined reference to `MeRGBLed::reset(unsigned char, unsigned char)'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans4.ltrans.o: In function `global constructors keyed to 65535_0_Firmware_for_MegaPi_0e.01.016_MAM_7.cpp.o.3788':
>
> <artificial>:(.text.startup+0x1a2): undefined reference to `Servo::Servo()'
>
> <artificial>:(.text.startup+0x1b4): undefined reference to `MeMegaPiDCMotor::MeMegaPiDCMotor()'
>
> <artificial>:(.text.startup+0x1bc): undefined reference to `MeTemperature::MeTemperature()'
>
> <artificial>:(.text.startup+0x1c4): undefined reference to `MeRGBLed::MeRGBLed()'
>
> <artificial>:(.text.startup+0x1cc): undefined reference to `Me7SegmentDisplay::Me7SegmentDisplay()'
>
> <artificial>:(.text.startup+0x1d4): undefined reference to `MePort::MePort()'
>
> <artificial>:(.text.startup+0x1dc): undefined reference to `MeLEDMatrix::MeLEDMatrix()'
>
> <artificial>:(.text.startup+0x1e8): undefined reference to `MeGyro::MeGyro(unsigned char, unsigned char)'
>
> <artificial>:(.text.startup+0x1f0): undefined reference to `MeCompass::MeCompass()'
>
> <artificial>:(.text.startup+0x1f8): undefined reference to `MeJoystick::MeJoystick()'
>
> <artificial>:(.text.startup+0x200): undefined reference to `MeStepperOnBoard::MeStepperOnBoard()'
>
> <artificial>:(.text.startup+0x208): undefined reference to `MeStepperOnBoard::MeStepperOnBoard()'
>
> <artificial>:(.text.startup+0x210): undefined reference to `MeStepperOnBoard::MeStepperOnBoard()'
>
> <artificial>:(.text.startup+0x218): undefined reference to `MeStepperOnBoard::MeStepperOnBoard()'
>
> <artificial>:(.text.startup+0x220): undefined reference to `MeBuzzer::MeBuzzer()'
>
> <artificial>:(.text.startup+0x228): undefined reference to `MeHumiture::MeHumiture()'
>
> <artificial>:(.text.startup+0x230): undefined reference to `MeFlameSensor::MeFlameSensor()'
>
> <artificial>:(.text.startup+0x238): undefined reference to `MeGasSensor::MeGasSensor()'
>
> <artificial>:(.text.startup+0x240): undefined reference to `MeTouchSensor::MeTouchSensor()'
>
> <artificial>:(.text.startup+0x248): undefined reference to `Me4Button::Me4Button()'
>
> <artificial>:(.text.startup+0x252): undefined reference to `MeEncoderOnBoard::MeEncoderOnBoard(unsigned char)'
>
> <artificial>:(.text.startup+0x25c): undefined reference to `MeEncoderOnBoard::MeEncoderOnBoard(unsigned char)'
>
> <artificial>:(.text.startup+0x266): undefined reference to `MeEncoderOnBoard::MeEncoderOnBoard(unsigned char)'
>
> <artificial>:(.text.startup+0x270): undefined reference to `MeEncoderOnBoard::MeEncoderOnBoard(unsigned char)'
>
> <artificial>:(.text.startup+0x27a): undefined reference to `MeLineFollower::MeLineFollower(unsigned char)'
>
> <artificial>:(.text.startup+0x282): undefined reference to `MeGyro::MeGyro()'
>
> C:\Users\CLPLAN~1\AppData\Local\Temp\ccftOw8q.ltrans3.ltrans.o: In function `_GLOBAL__sub_D_mePort':
>
> <artificial>:(.text.exit+0xc): undefined reference to `MeRGBLed::~MeRGBLed()'
>
> collect2.exe: error: ld returned 1 exit status
>
> *** [.pioenvs\megaatmega2560\firmware.elf] Error 1
>
> ======================================================================================= [ERROR] Took 4.45 seconds =======================================================================================
>
> The terminal process terminated with exit code: 1
>
> Terminal will be reused by tasks, press any key to close it.