Im a bit new to re-compiling Marlin code for my Tevo Tornado Gold printer. I am self taught and really dont have any other resources other that me recently finding this website so hopefully someone can assist. I getting these errors after a couple of years not doing this. All Im trying to do it enable the Host_Action_Commands and re-compile. Would someone be able to assist me in fixing this? Any help would be greatly appreciated!
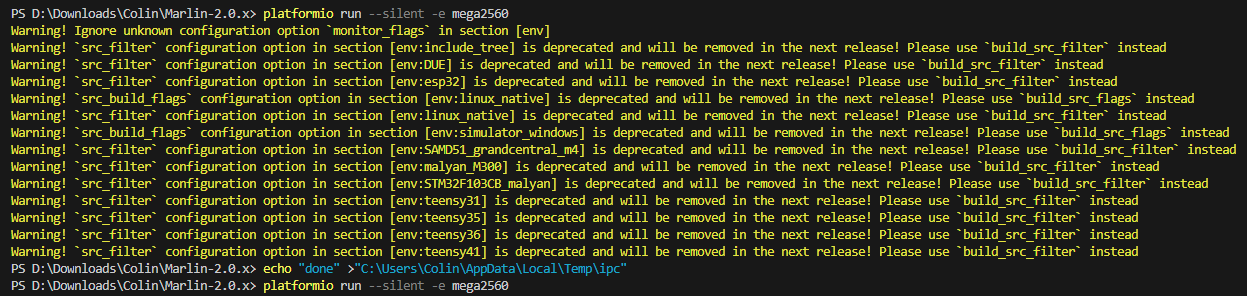
There’s no error shown in the screenshot through, only deprecation warnings.
So does that mean it is safe to make the changes I need too and re-compile? I never used to get the error in the past and dont quite understand with it means or how to fix the warning messages. Is that something that can be fixed?
The deprecation warnings fundamentally come from using a newer PlatformIO core (it auto-updates) with an older Marlin version. If you want to get rid of them, just search and replace src_filter to build_src_filter etc.
Ok… Are are there specific files I need to change that in or do I just search through all of them in the entire folder?
It’s just the platformio.ini and all files in the ini/ folder, if your Marlin version is even new enough to have that.
Ok, i fixed all of the warnings and it seems like its trying to compile the code but failing, however, now its giving me this output.
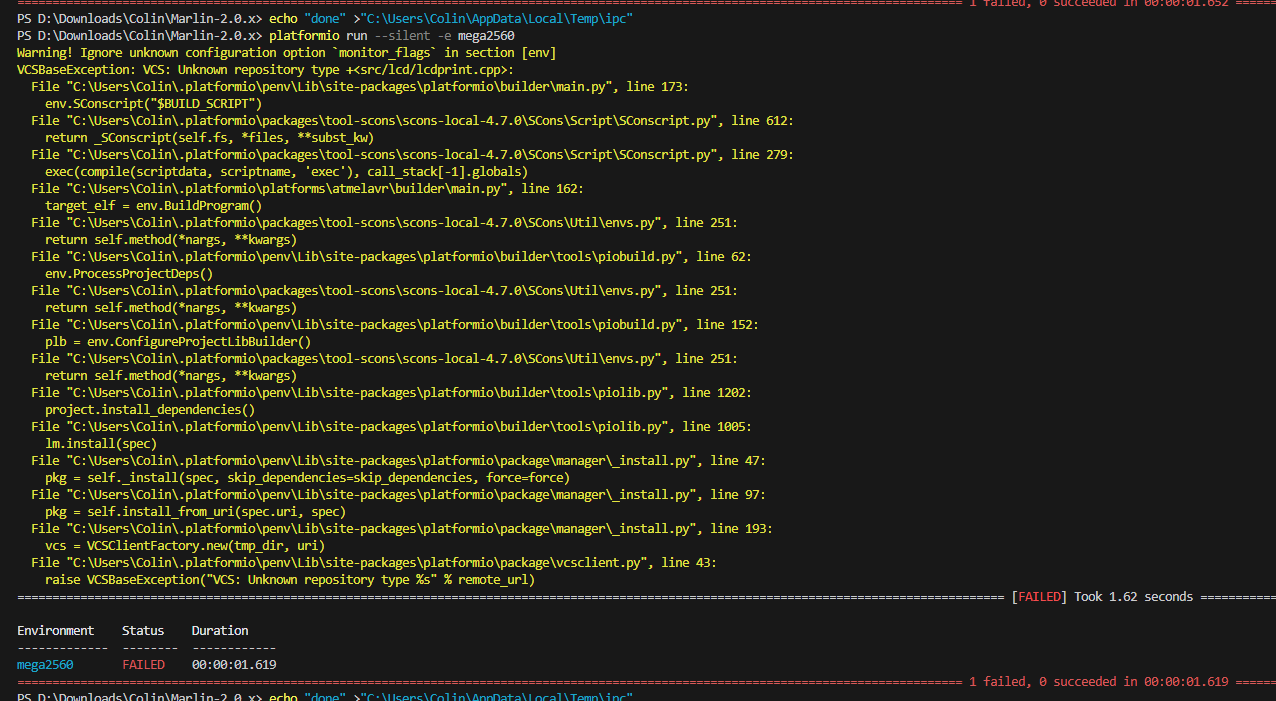
Seems like some line slipt from build_src_filter into lib_deps. The +<src/lcd/lcdprint.cpp> line should be a build_src_filter line. Recheck that. Otherwise, post the full platformio.ini.
Here is the current platform.ini file… I could figure out how to upload the file itself so I copied it.
#
# Marlin Firmware
# PlatformIO Configuration File
#
# For detailed documentation with EXAMPLES:
#
# https://docs.platformio.org/en/latest/projectconf/index.html
#
# Automatic targets - enable auto-uploading
#targets = upload
[platformio]
src_dir = Marlin
boards_dir = buildroot/share/PlatformIO/boards
default_envs = mega2560
include_dir = Marlin
extra_configs =
ini/avr.ini
ini/due.ini
ini/esp32.ini
ini/features.ini
ini/lpc176x.ini
ini/native.ini
ini/samd51.ini
ini/stm32-common.ini
ini/stm32f0.ini
ini/stm32f1-maple.ini
ini/stm32f1.ini
ini/stm32f4.ini
ini/stm32f7.ini
ini/stm32h7.ini
ini/stm32g0.ini
ini/teensy.ini
#
# The 'common' section applies to most Marlin builds.
#
# By default platformio build will abort after 5 errors.
# Remove '-fmax-errors=5' from build_flags below to see all.
#
[common]
build_flags = -g3 -D__MARLIN_FIRMWARE__ -DNDEBUG
-fmax-errors=5
extra_scripts =
pre:buildroot/share/PlatformIO/scripts/common-dependencies.py
pre:buildroot/share/PlatformIO/scripts/common-cxxflags.py
pre:buildroot/share/PlatformIO/scripts/preflight-checks.py
post:buildroot/share/PlatformIO/scripts/common-dependencies-post.py
lib_deps =
default_build_src_filter = +<src/*> -<src/config> -<src/HAL> +<src/HAL/shared>
-<src/lcd/HD44780> -<src/lcd/TFTGLCD> -<src/lcd/dogm> -<src/lcd/tft> -<src/lcd/tft_io>
-<src/HAL/STM32/tft> -<src/HAL/STM32F1/tft>
-<src/lcd/e3v2/common> -<src/lcd/e3v2/creality> -<src/lcd/e3v2/enhanced> -<src/lcd/e3v2/jyersui> -<src/lcd/e3v2/marlinui>
-<src/lcd/menu>
-<src/lcd/menu/game/game.cpp> -<src/lcd/menu/game/brickout.cpp> -<src/lcd/menu/game/invaders.cpp>
-<src/lcd/menu/game/maze.cpp> -<src/lcd/menu/game/snake.cpp>
-<src/lcd/menu/menu_backlash.cpp>
-<src/lcd/menu/menu_bed_corners.cpp>
-<src/lcd/menu/menu_bed_leveling.cpp>
-<src/lcd/menu/menu_cancelobject.cpp>
-<src/lcd/menu/menu_delta_calibrate.cpp>
-<src/lcd/menu/menu_filament.cpp>
-<src/lcd/menu/menu_info.cpp>
-<src/lcd/menu/menu_job_recovery.cpp>
-<src/lcd/menu/menu_language.cpp>
-<src/lcd/menu/menu_led.cpp>
-<src/lcd/menu/menu_media.cpp>
-<src/lcd/menu/menu_mmu2.cpp>
-<src/lcd/menu/menu_password.cpp>
-<src/lcd/menu/menu_power_monitor.cpp>
-<src/lcd/menu/menu_spindle_laser.cpp>
-<src/lcd/menu/menu_temperature.cpp>
-<src/lcd/menu/menu_tmc.cpp>
-<src/lcd/menu/menu_touch_screen.cpp>
-<src/lcd/menu/menu_tramming.cpp>
-<src/lcd/menu/menu_ubl.cpp>
-<src/lcd/menu/menu_x_twist.cpp>
-<src/lcd/extui/anycubic_chiron>
-<src/lcd/extui/anycubic_i3mega>
-<src/lcd/extui/dgus> -<src/lcd/extui/dgus/fysetc> -<src/lcd/extui/dgus/hiprecy> -<src/lcd/extui/dgus/mks> -<src/lcd/extui/dgus/origin>
-<src/lcd/extui/dgus_reloaded>
-<src/lcd/extui/example>
-<src/lcd/extui/ftdi_eve_touch_ui>
-<src/lcd/extui/malyan>
-<src/lcd/extui/mks_ui>
-<src/lcd/extui/nextion>
-<src/lcd/lcdprint.cpp>
-<src/lcd/touch/touch_buttons.cpp>
-<src/sd/usb_flashdrive/lib-uhs2> -<src/sd/usb_flashdrive/lib-uhs3>
-<src/sd/usb_flashdrive/Sd2Card_FlashDrive.cpp>
-<src/sd/cardreader.cpp> -<src/sd/Sd2Card.cpp> -<src/sd/SdBaseFile.cpp> -<src/sd/SdFatUtil.cpp> -<src/sd/SdFile.cpp> -<src/sd/SdVolume.cpp>
-<src/HAL/shared/backtrace>
-<src/HAL/shared/cpu_exception>
-<src/HAL/shared/eeprom_if_i2c.cpp>
-<src/HAL/shared/eeprom_if_spi.cpp>
-<src/feature/adc> -<src/gcode/feature/adc>
-<src/feature/babystep.cpp>
-<src/feature/backlash.cpp>
-<src/feature/baricuda.cpp> -<src/gcode/feature/baricuda>
-<src/feature/bedlevel/abl> -<src/gcode/bedlevel/abl>
-<src/feature/bedlevel/abl/x_twist.cpp>
-<src/feature/bedlevel/mbl> -<src/gcode/bedlevel/mbl>
-<src/feature/bedlevel/ubl> -<src/gcode/bedlevel/ubl>
-<src/feature/bedlevel/hilbert_curve.cpp>
-<src/feature/binary_stream.cpp> -<src/libs/heatshrink>
-<src/feature/bltouch.cpp>
-<src/feature/cancel_object.cpp> -<src/gcode/feature/cancel>
-<src/feature/caselight.cpp> -<src/gcode/feature/caselight>
-<src/feature/closedloop.cpp>
-<src/feature/controllerfan.cpp> -<src/gcode/feature/controllerfan>
-<src/feature/cooler.cpp> -<src/gcode/temp/M143_M193.cpp>
-<src/feature/dac> -<src/feature/digipot>
-<src/feature/direct_stepping.cpp> -<src/gcode/motion/G6.cpp>
-<src/feature/e_parser.cpp>
-<src/feature/easythreed_ui.cpp>
-<src/feature/encoder_i2c.cpp>
-<src/feature/ethernet.cpp> -<src/gcode/feature/network/M552-M554.cpp>
-<src/feature/fancheck.cpp>
-<src/feature/fanmux.cpp>
-<src/feature/filwidth.cpp> -<src/gcode/feature/filwidth>
-<src/feature/fwretract.cpp> -<src/gcode/feature/fwretract>
-<src/feature/host_actions.cpp>
-<src/feature/hotend_idle.cpp>
-<src/feature/joystick.cpp>
-<src/feature/leds/blinkm.cpp>
-<src/feature/leds/leds.cpp>
-<src/feature/leds/neopixel.cpp>
-<src/feature/leds/pca9533.cpp>
-<src/feature/leds/pca9632.cpp>
-<src/feature/leds/printer_event_leds.cpp>
-<src/feature/leds/tempstat.cpp>
-<src/feature/max7219.cpp>
-<src/feature/meatpack.cpp>
-<src/feature/mixing.cpp>
-<src/feature/mmu/mmu.cpp>
-<src/feature/mmu/mmu2.cpp> -<src/gcode/feature/prusa_MMU2>
-<src/feature/password> -<src/gcode/feature/password>
-<src/feature/pause.cpp>
-<src/feature/power.cpp>
-<src/feature/power_monitor.cpp> -<src/gcode/feature/power_monitor>
-<src/feature/powerloss.cpp> -<src/gcode/feature/powerloss>
-<src/feature/probe_temp_comp.cpp>
-<src/feature/repeat.cpp>
-<src/feature/runout.cpp> -<src/gcode/feature/runout>
-<src/feature/snmm.cpp>
-<src/feature/solenoid.cpp> -<src/gcode/control/M380_M381.cpp>
-<src/feature/spindle_laser.cpp> -<src/gcode/control/M3-M5.cpp>
-<src/feature/stepper_driver_safety.cpp>
-<src/feature/tmc_util.cpp> -<src/module/stepper/trinamic.cpp>
-<src/feature/tramming.cpp>
-<src/feature/twibus.cpp>
-<src/feature/z_stepper_align.cpp>
-<src/gcode/bedlevel/G26.cpp>
-<src/gcode/bedlevel/G35.cpp>
-<src/gcode/bedlevel/G42.cpp>
-<src/gcode/bedlevel/M420.cpp> -<src/feature/bedlevel/bedlevel.cpp>
-<src/gcode/calibrate/G33.cpp>
-<src/gcode/calibrate/G34.cpp>
-<src/gcode/calibrate/G34_M422.cpp>
-<src/gcode/calibrate/G76_M871.cpp>
-<src/gcode/calibrate/G425.cpp>
-<src/gcode/calibrate/M12.cpp>
-<src/gcode/calibrate/M48.cpp>
-<src/gcode/calibrate/M100.cpp>
-<src/gcode/calibrate/M425.cpp>
-<src/gcode/calibrate/M665.cpp>
-<src/gcode/calibrate/M666.cpp>
-<src/gcode/calibrate/M852.cpp>
-<src/gcode/control/M10-M11.cpp>
-<src/gcode/control/M42.cpp> -<src/gcode/control/M226.cpp>
-<src/gcode/config/M43.cpp>
-<src/gcode/config/M217.cpp>
-<src/gcode/config/M218.cpp>
-<src/gcode/config/M221.cpp>
-<src/gcode/config/M301.cpp>
-<src/gcode/config/M302.cpp>
-<src/gcode/config/M304.cpp>
-<src/gcode/config/M305.cpp>
-<src/gcode/config/M540.cpp>
-<src/gcode/config/M575.cpp>
-<src/gcode/config/M672.cpp>
-<src/gcode/control/M7-M9.cpp>
-<src/gcode/control/M211.cpp>
-<src/gcode/control/M350_M351.cpp>
-<src/gcode/control/M605.cpp>
-<src/gcode/feature/advance>
-<src/gcode/feature/camera>
-<src/gcode/feature/i2c>
-<src/gcode/feature/L6470>
-<src/gcode/feature/leds/M150.cpp>
-<src/gcode/feature/leds/M7219.cpp>
-<src/gcode/feature/macro>
-<src/gcode/feature/mixing/M163-M165.cpp>
-<src/gcode/feature/mixing/M166.cpp>
-<src/gcode/feature/pause/G27.cpp>
-<src/gcode/feature/pause/G60.cpp>
-<src/gcode/feature/pause/G61.cpp>
-<src/gcode/feature/pause/M125.cpp>
-<src/gcode/feature/pause/M600.cpp>
-<src/gcode/feature/pause/M603.cpp>
-<src/gcode/feature/pause/M701_M702.cpp>
-<src/gcode/feature/trinamic/M122.cpp>
-<src/gcode/feature/trinamic/M569.cpp>
-<src/gcode/feature/trinamic/M906.cpp>
-<src/gcode/feature/trinamic/M911-M914.cpp>
-<src/gcode/feature/trinamic/M919.cpp>
-<src/gcode/geometry/G17-G19.cpp>
-<src/gcode/geometry/G53-G59.cpp>
-<src/gcode/geometry/M206_M428.cpp>
-<src/gcode/host/M16.cpp>
-<src/gcode/host/M113.cpp>
-<src/gcode/host/M154.cpp>
-<src/gcode/host/M360.cpp>
-<src/gcode/host/M876.cpp>
-<src/gcode/lcd/M0_M1.cpp>
-<src/gcode/lcd/M117.cpp>
-<src/gcode/lcd/M250.cpp> -<src/gcode/lcd/M256.cpp>
-<src/gcode/lcd/M300.cpp>
-<src/gcode/lcd/M414.cpp>
-<src/gcode/lcd/M73.cpp>
-<src/gcode/lcd/M995.cpp>
-<src/gcode/motion/G2_G3.cpp>
-<src/gcode/motion/G5.cpp>
-<src/gcode/motion/G80.cpp>
-<src/gcode/motion/M290.cpp>
-<src/gcode/probe/G30.cpp>
-<src/gcode/probe/G31_G32.cpp>
-<src/gcode/probe/G38.cpp>
-<src/gcode/probe/M401_M402.cpp>
-<src/gcode/probe/M851.cpp>
-<src/gcode/probe/M951.cpp>
-<src/gcode/scara>
-<src/gcode/sd>
-<src/gcode/sd/M32.cpp>
-<src/gcode/sd/M808.cpp>
-<src/gcode/temp/M104_M109.cpp>
-<src/gcode/temp/M123.cpp>
-<src/gcode/temp/M155.cpp>
-<src/gcode/temp/M192.cpp>
-<src/gcode/units/G20_G21.cpp>
-<src/gcode/units/M82_M83.cpp>
-<src/gcode/units/M149.cpp>
-<src/libs/BL24CXX.cpp> -<src/libs/W25Qxx.cpp>
-<src/libs/L64XX> -<src/module/stepper/L64xx.cpp> -<src/HAL/shared/HAL_spi_L6470.cpp>
-<src/libs/MAX31865.cpp>
-<src/libs/hex_print.cpp>
-<src/libs/least_squares_fit.cpp>
-<src/libs/nozzle.cpp> -<src/gcode/feature/clean>
-<src/module/delta.cpp>
-<src/module/planner_bezier.cpp>
-<src/module/polargraph.cpp>
-<src/module/printcounter.cpp>
-<src/module/probe.cpp>
-<src/module/scara.cpp>
-<src/module/servo.cpp> -<src/gcode/control/M280.cpp> -<src/gcode/config/M281.cpp> -<src/gcode/control/M282.cpp>
-<src/module/stepper/TMC26X.cpp>
#
# Default values apply to all 'env:' prefixed environments
#
[env]
framework = arduino
extra_scripts = ${common.extra_scripts}
build_flags = ${common.build_flags}
lib_deps = ${common.lib_deps}
monitor_speed = 250000
monitor_flags =
--quiet
--echo
--eol
LF
--filter
colorize
--filter
time
#
# Just print the dependency tree
#
[env:include_tree]
platform = atmelavr
board = megaatmega2560
build_flags = -c -H -std=gnu++11 -Wall -Os -D__MARLIN_FIRMWARE__
build_src_filter = +<src/MarlinCore.cpp>And the other .ini files? This one looks fine.
Maybe Im looking in the wrong place, but do you want me to copy/paste all of these .ini files listed in the screenshot or are there only specific ones you need to see? I apologize for my ignorance.
It would be easier to just upload the project as a whole to Github.
Im fairly new to Github other than knowing how to download Marlin files to compile. I create an account and figured out how to add files, however, Github isnt allowing most of the files Im trying to upload. Is there something Im missing?
… then it’s easier if you zip everything (excluding the .pio folder with build artefacts) and upload to GoogleDrive, Dropbox, whatever?
Ok… I have added the files to Onedrive… Here is the link.