Hello,
now I truied a very small project, only with a while loop and a variable that was counted up.
It worked, great 
After that I took another sample project, MQTT Server with Ethernet (ATMEGA2560 and Ethernetcard)
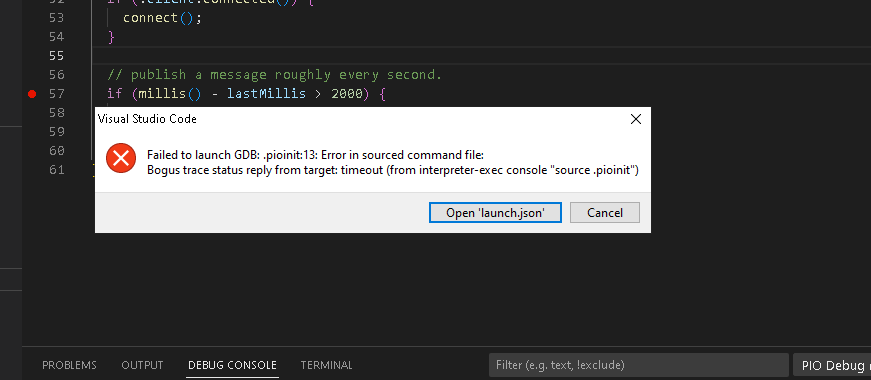
Then I got following error message, now I am at the beginning 
The project itself run, but debugging is not possible, could you help again?
[env:megaatmega2560]
platform = atmelavr
board = megaatmega2560
framework = arduino
; monitor_speed= 38400
build_flags = -DAVR8_BREAKPOINT_MODE=1
debug_tool = avr-stub
debug_port = \.\COM5
lib_deps = jdolinay/avr-debugger@^1.5
DEBUG CONSOLE
Processing megaatmega2560 (platform: atmelavr; board: megaatmega2560; framework: arduino)
--------------------------------------------------------------------------------
Verbose mode can be enabled via -v, --verbose option
CONFIGURATION: Redirecting...
PLATFORM: Atmel AVR (4.0.0) > Arduino Mega or Mega 2560 ATmega2560 (Mega 2560)
HARDWARE: ATMEGA2560 16MHz, 8KB RAM, 248KB Flash
DEBUG: Current (avr-stub) On-board (avr-stub, simavr)
PACKAGES:
-
- framework-arduino-avr @ 5.1.0*
-
- tool-avrdude @ 1.60300.200527 (6.3.0)*
-
- toolchain-atmelavr @ 1.70300.191015 (7.3.0)*
LDF: Library Dependency Finder → Library Dependency Finder (LDF) — PlatformIO latest documentation
LDF Modes: Finder ~ chain, Compatibility ~ soft
Found 9 compatible libraries
Scanning dependencies…
Dependency Graph
|-- avr-debugger @ 1.5.0
|-- Ethernet @ 2.0.1
| |-- SPI @ 1.0
|-- MQTT @ 2.5.0
Building in debug mode
Compiling .pio\build\megaatmega2560\src\test.cpp.o
Compiling .pio\build\megaatmega2560\lib2dd\avr-debugger\app_api.c.o
Compiling .pio\build\megaatmega2560\lib2dd\avr-debugger\avr8-stub.c.o
Compiling .pio\build\megaatmega2560\lib1fb\SPI\SPI.cpp.o
Archiving .pio\build\megaatmega2560\lib1fb\libSPI.a
Archiving .pio\build\megaatmega2560\lib2dd\libavr-debugger.a
Compiling .pio\build\megaatmega2560\libc06\Ethernet\Dhcp.cpp.o
Compiling .pio\build\megaatmega2560\libc06\Ethernet\Dns.cpp.o
Compiling .pio\build\megaatmega2560\libc06\Ethernet\Ethernet.cpp.o
Compiling .pio\build\megaatmega2560\libc06\Ethernet\EthernetClient.cpp.o
Compiling .pio\build\megaatmega2560\libc06\Ethernet\EthernetServer.cpp.o
Compiling .pio\build\megaatmega2560\libc06\Ethernet\EthernetUdp.cpp.o
Compiling .pio\build\megaatmega2560\libc06\Ethernet\socket.cpp.o
Compiling .pio\build\megaatmega2560\libc06\Ethernet\utility\w5100.cpp.o
Compiling .pio\build\megaatmega2560\libb53\arduino-mqtt-master\MQTTClient.cpp.o
Archiving .pio\build\megaatmega2560\libc06\libEthernet.a
Compiling .pio\build\megaatmega2560\libb53\arduino-mqtt-master\lwmqtt\client.c.o
Compiling .pio\build\megaatmega2560\libb53\arduino-mqtt-master\lwmqtt\helpers.c.o
Compiling .pio\build\megaatmega2560\libb53\arduino-mqtt-master\lwmqtt\packet.c.o
Compiling .pio\build\megaatmega2560\libb53\arduino-mqtt-master\lwmqtt\string.c.o
Archiving .pio\build\megaatmega2560\libb53\libarduino-mqtt-master.a
Archiving .pio\build\megaatmega2560\libFrameworkArduinoVariant.a
Compiling .pio\build\megaatmega2560\FrameworkArduino\CDC.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\HardwareSerial.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\HardwareSerial0.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\HardwareSerial1.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\HardwareSerial2.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\HardwareSerial3.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\IPAddress.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\PluggableUSB.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\Print.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\Stream.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\Tone.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\USBCore.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\WInterrupts.c.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\WMath.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\WString.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\abi.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\hooks.c.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\main.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\new.cpp.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\wiring.c.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\wiring_analog.c.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\wiring_digital.c.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\wiring_pulse.S.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\wiring_pulse.c.o
Compiling .pio\build\megaatmega2560\FrameworkArduino\wiring_shift.c.o
Archiving .pio\build\megaatmega2560\libFrameworkArduino.a
Linking .pio\build\megaatmega2560\firmware.elf
Checking size .pio\build\megaatmega2560\firmware.elf
Advanced Memory Usage is available via “PlatformIO Home > Project Inspect”
RAM: [= ] 5.5% (used 449 bytes from 8192 bytes)
Flash: [= ] 10.6% (used 26904 bytes from 253952 bytes)
Building .pio\build\megaatmega2560\firmware.hex
Configuring upload protocol…
AVAILABLE: wiring
CURRENT: upload_protocol = wiring
Looking for upload port…
Auto-detected: COM5
Uploading .pio\build\megaatmega2560\firmware.hex
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.02s
avrdude: Device signature = 0x1e9801 (probably m2560)
avrdude: reading input file “.pio\build\megaatmega2560\firmware.hex”
avrdude: writing flash (26904 bytes):
Writing | ################################################## | 100% 4.47s
avrdude: 26904 bytes of flash written
avrdude: verifying flash memory against .pio\build\megaatmega2560\firmware.hex:
avrdude: load data flash data from input file .pio\build\megaatmega2560\firmware.hex:
avrdude: input file .pio\build\megaatmega2560\firmware.hex contains 26904 bytes
avrdude: reading on-chip flash data:
Reading | ################################################## | 100% 3.70s
avrdude: verifying …
avrdude: 26904 bytes of flash verified
avrdude done. Thank you.
========================= [SUCCESS] Took 24.50 seconds =========================
Reading symbols from d:\Eigene Dateien\Documents\PlatformIO\Projects\Arduino Mega.pio\build\megaatmega2560\firmware.elf…
done.
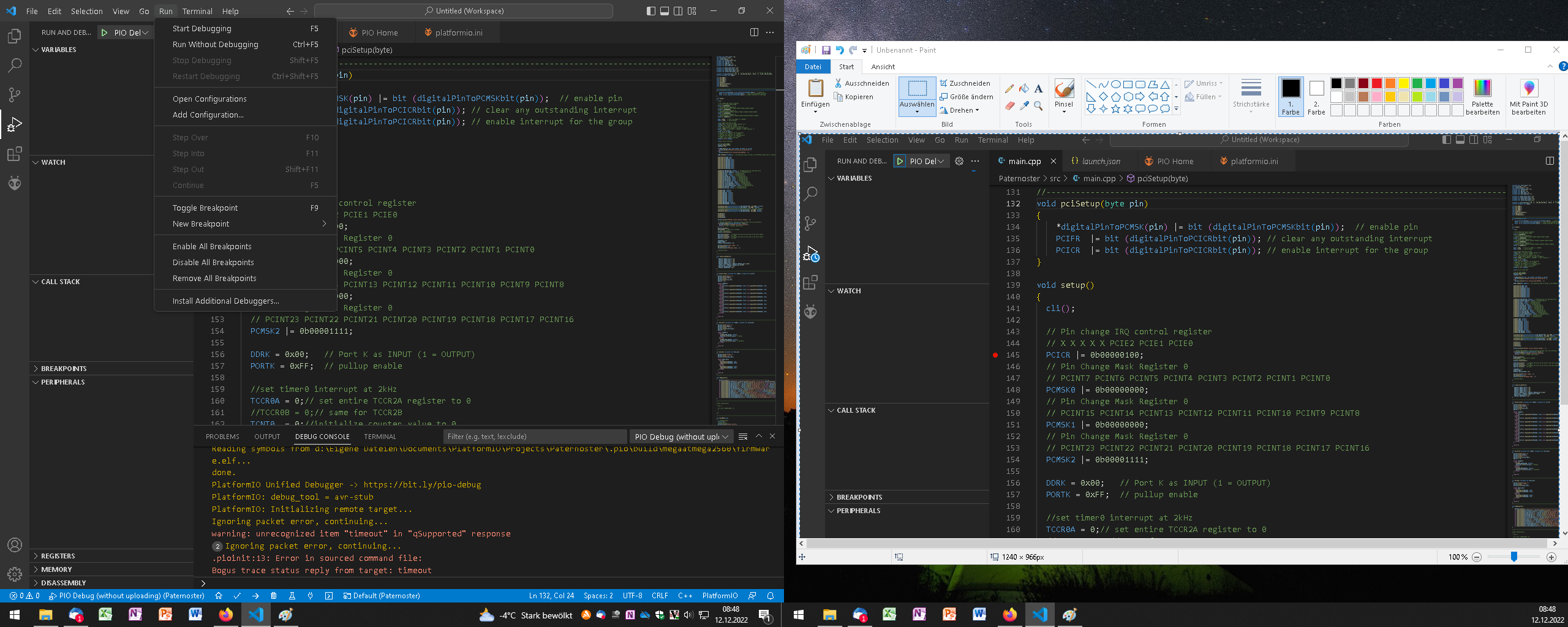
PlatformIO Unified Debugger → Redirecting...
PlatformIO: debug_tool = avr-stub
PlatformIO: Initializing remote target…
Ignoring packet error, continuing…
warning: unrecognized item “timeout” in “qSupported” response
Ignoring packet error, continuing…
Ignoring packet error, continuing…
.pioinit:13: Error in sourced command file:
Bogus trace status reply from target: timeout
 it works Thanks
it works Thanks