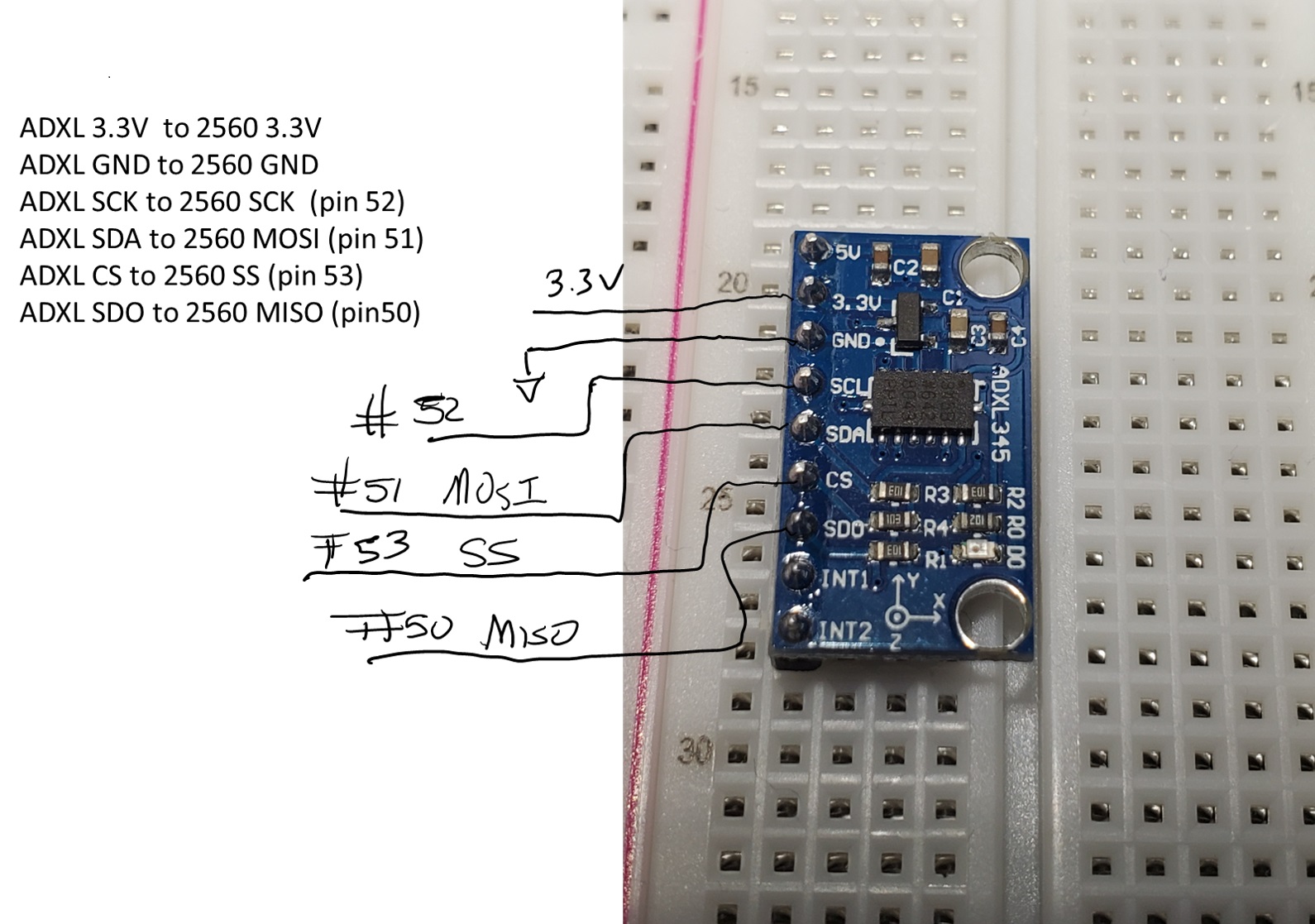
My class is using PlatformIO IDE to develop their own code for SPI read and write. We are doing a lab where we read data from the ADXL345 accelerometer (all 3 axis).
To see the values of the x,y and z axis - we are using the Serial.print(); statement. There seems to be an issue with it working sometimes and not working. I have changed the serial.flush command location but there is still an intermittent issue.
Moderator edit: added code formatting tags and removed blank lines
Here is the platformio file contents:
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:megaatmega2560]
platform = atmelavr
board = megaatmega2560
framework = arduino
Here is the code:
main():
#include <Arduino.h>
#include <avr/io.h>
#include "spi.h"
unsigned char POWER_CTL = 0x2D; // Power Control Register
unsigned char DATA_FORMAT = 0x31; // Data Format Register
int main(){
// Set baud rate for serial transmission, flush before printing anything
Serial.begin(9600);
//Serial.flush();
// initialize SPI
//Serial.println("initSPI()");
initSPI();
spi_write(POWER_CTL, 0x08); // set to measure mode
spi_write(DATA_FORMAT, 0x00); // configure 4-wire mode by clearing the SPI bit
while(1){
// Read current XYZ position from ADXL345
Serial.println("readAccel()");
Serial.flush();
readAccel();
printCoords();
// Delay for 1000 ms
_delay_ms(1000);
}
return 0;
}
spi.ccp
#include <Arduino.h>
#include "spi.h"
#include <avr/io.h>
#define wait_for_completion while(!(SPSR & (1<<SPIF)));
unsigned char DATAX0_REG = 0x32; // X-Axis Data 0 Register
unsigned char DATAX1_REG = 0x33; // X-Axis Data 1 Register
unsigned char DATAY0_REG = 0x34; // Y-Axis Data 0 Register
unsigned char DATAY1_REG = 0x35; // Y-Axis Data 1 Register
unsigned char DATAZ0_REG = 0x36; // Z-Axis Data 0 Register
unsigned char DATAZ1_REG = 0x37; // Z-Axis Data 1 Register
unsigned char dataX0, dataX1, dataY0, dataY1, dataZ0, dataZ1;
int dataX, dataY, dataZ;
void initSPI(){
// set the SS, MOSI, and SCLK pin as output
DDRB |= (1 << DDB0) | (1 << DDB1) | (1 << DDB2);
// set the MISO pin as input
DDRB &= ~(1 << DDB3);
// set SS high at first
PORTB |= (1 << PORTB0);
// enable the interrupt, SPI, master mode, CPOL, CPHA, default clock, and fosc/128
//ADXL345 CPOL = 1, CPHA = 1
SPCR |= (1 << SPIE) | (1 << SPE) | (1 << MSTR) | (1 << CPOL)| (1 << CPHA)| (1 << SPR1) | (1 << SPR0);
// Initialize data read variables
dataX0 = 0;
dataX1 = 0;
dataX = 0;
dataY0 = 0;
dataY1 = 0;
dataY = 0;
dataZ0 = 0;
dataZ1 = 0;
dataZ = 0;
/*Serial.print("X: ");
Serial.println(dataX);
Serial.print("Y: ");
Serial.println(dataY);
Serial.print("Z: ");
Serial.println(dataZ);
Serial.println();*/
}
/*
write to a register of an SPI device
regAddress = register address of the SPI device
value = value to be written to the specified register of the SPI device
*/
void spi_write(unsigned char regAddress, unsigned char value){
// set SS low to begin SPI frame
PORTB &= ~(1 << PORTB0);
SPDR = regAddress;
wait_for_completion;
SPDR = value;
wait_for_completion;
// set SS high to end SPI frame
PORTB |= (1 << PORTB0);
//_delay_ms(1000);
}
unsigned char spi_read (unsigned char regAddress)
{
// 0x80 = read mask; 0x00 = dummy value to be sent
spi_write (0x80 | regAddress, 0x00);
return SPDR;
}
void readAccel(){
// Read X0 & X1 Data
dataX0 = spi_read(DATAX0_REG);
dataX1 = spi_read(DATAX1_REG);
// Combine X0 and X1
dataX = (dataX1 << 8) | dataX0;
// Read Y0 & Y1 Data
dataY0 = spi_read(DATAY0_REG);
dataY1 = spi_read(DATAY1_REG);
// Combine Y0 and Y1
dataY = (dataY1 << 8) | dataY0;
// Read X0 & Z1 Data
dataZ0 = spi_read(DATAZ0_REG);
dataZ1 = spi_read(DATAZ1_REG);
// Combine X0 and X1
dataZ = (dataZ1 << 8) | dataZ0;
}
void printCoords(){
//Serial.flush();
Serial.print("X: ");
Serial.println(dataX);
Serial.print("Y: ");
Serial.println(dataY);
Serial.print("Z: ");
Serial.println(dataZ);
Serial.println();
}