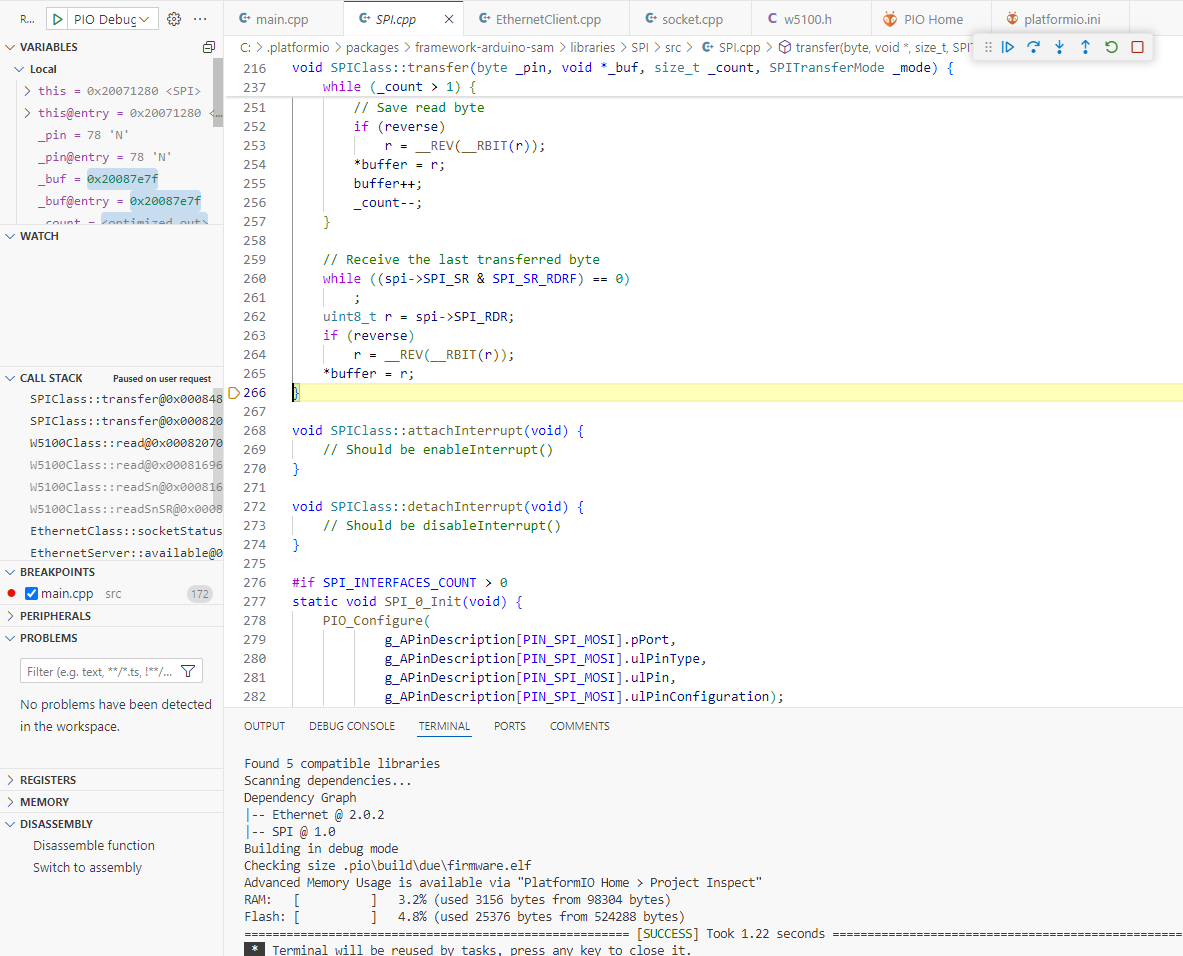
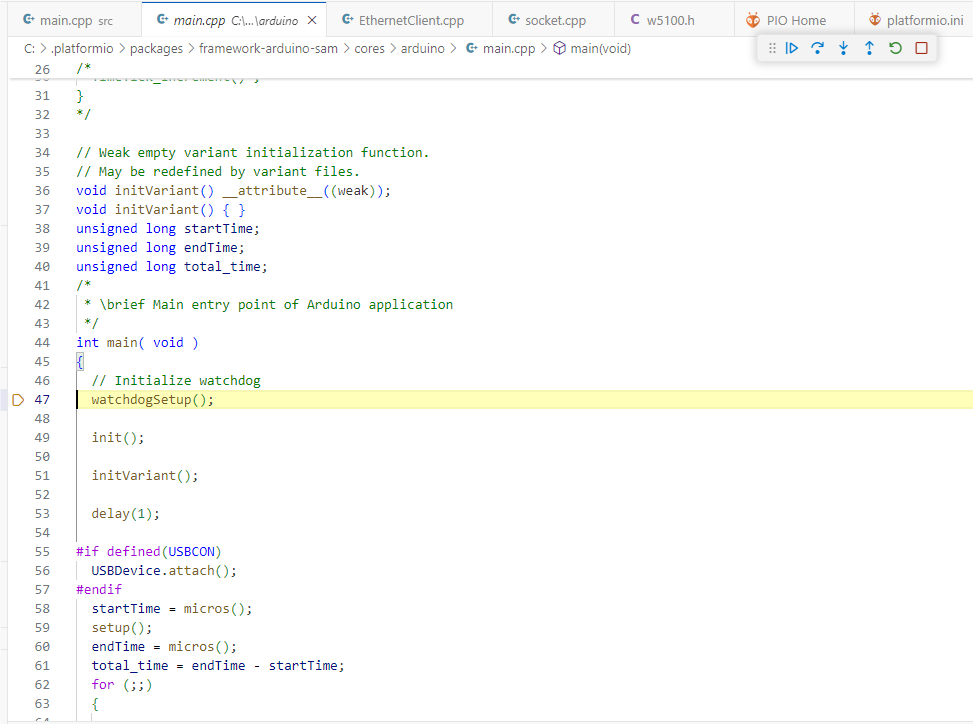
Hello everyone, as my title suggests, PIO Debugger is stopping in main() but not at my breakpoint in setup() or loop(), as shown in the image below.
It stops in main()
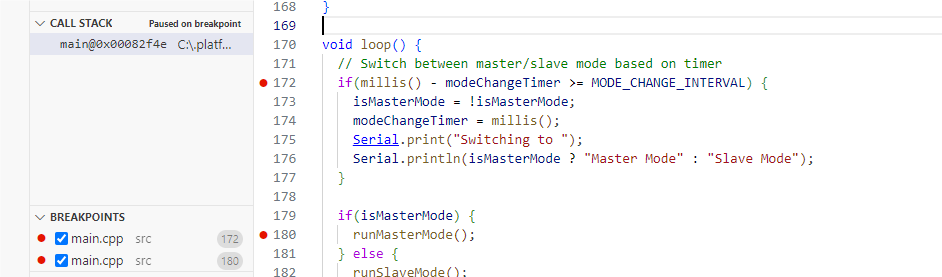
but not at my breakpoint.
Here is my code main.cpp
#include <SPI.h>
#include <Ethernet.h>
// Pin Definitions
// Network Configuration
byte mac[] = { 0xA8, 0x61, 0x0A, 0xAE, 0x0A, 0xCC };
IPAddress server(192, 168, 123, 209); // ModbusTCP server address
IPAddress localIP(192, 168, 123, 207); // Local IP address as slave
EthernetClient ethClient;
EthernetServer slaveServer(502); // Modbus slave server
// ModbusTCP Configuration
uint16_t transactionId = 0;
uint16_t holdingRegisters[100]; // Holding registers array
bool isMasterMode = true; // Mode switching flag
unsigned long modeChangeTimer = 0; // Mode change timer
const unsigned long MODE_CHANGE_INTERVAL = 5000; // Mode change interval(ms)
unsigned long requestStartTime = 0; // Request start time
unsigned long lastRequestTime = 0; // Last request time
const unsigned long REQUEST_INTERVAL = 2000000; // 2 seconds = 2000000 microseconds
void sendModbusRequest(byte slaveId, byte functionCode, uint16_t startAddr, uint16_t quantity) {
byte request[12];
// Modbus TCP Frame Header
request[0] = highByte(transactionId);
request[1] = lowByte(transactionId++);
request[2] = 0x00; // Protocol Identifier High Byte
request[3] = 0x00; // Protocol Identifier Low Byte
request[4] = 0x00; // Length High Byte
request[5] = 0x06; // Length Low Byte
request[6] = slaveId;
request[7] = functionCode;
request[8] = highByte(startAddr);
request[9] = lowByte(startAddr);
request[10] = highByte(quantity);
request[11] = lowByte(quantity);
ethClient.write(request, 12);
}
void processModbusRequest(EthernetClient &client, byte *buffer, int len) {
uint16_t transId = (buffer[0] << 8) | buffer[1];
byte functionCode = buffer[7];
uint16_t startAddr = (buffer[8] << 8) | buffer[9];
uint16_t quantity = (buffer[10] << 8) | buffer[11];
if(functionCode == 0x03) { // Read Holding Registers
byte response[256];
int responseLen = 9; // MBAP header(7) + Function code(1) + Byte count(1)
// Fill response header
response[0] = buffer[0]; // Transaction ID
response[1] = buffer[1];
response[2] = 0x00; // Protocol ID
response[3] = 0x00;
response[4] = 0x00; // Length High Byte (filled later)
response[5] = 0x00; // Length Low Byte (filled later)
response[6] = buffer[6]; // Unit ID
response[7] = functionCode;
response[8] = quantity * 2; // Byte count
// Fill data
for(int i = 0; i < quantity; i++) {
response[responseLen++] = highByte(holdingRegisters[startAddr + i]);
response[responseLen++] = lowByte(holdingRegisters[startAddr + i]);
}
// Update length field
response[4] = highByte(responseLen - 6);
response[5] = lowByte(responseLen - 6);
client.write(response, responseLen);
}
}
void readModbusResponse() {
byte buffer[256];
int len = 0;
while (ethClient.available() && len < 256) {
buffer[len++] = ethClient.read();
}
if (len > 0) {
Serial.print("Response received, length: ");
Serial.println(len);
Serial.print("Data content: ");
// Print each byte in hexadecimal format
for(int i = 0; i < len; i++) {
if(buffer[i] < 0x10) {
Serial.print("0"); // Add leading zero
}
Serial.print(buffer[i], HEX);
Serial.print(" ");
}
Serial.println(); // New line
// Parse Modbus response
if(len >= 9 && buffer[7] == 0x03) { // Verify read holding register response
byte dataLen = buffer[8]; // Number of data bytes
if(len >= (9 + dataLen)) {
uint16_t registerValue = (buffer[9] << 8) | buffer[10]; // Combine high and low bytes
Serial.print("Register value: ");
Serial.println(registerValue);
unsigned long responseTime = micros() - requestStartTime; // Calculate response time
Serial.print("Response time (microseconds): ");
Serial.println(responseTime);
}
}
}
}
void runMasterMode() {
if (!ethClient.connected()) {
if (ethClient.connect(server, 502)) {
Serial.println("Connected to Modbus server");
} else {
Serial.println("Connection failed");
return;
}
}
// Check if sending interval has elapsed
if (micros() - lastRequestTime >= REQUEST_INTERVAL) {
requestStartTime = micros(); // Record sending time
sendModbusRequest(0x01, 0x03, 0x0000, 0x0001);
lastRequestTime = micros();
}
if (ethClient.available()) {
readModbusResponse();
}
}
void runSlaveMode() {
EthernetClient client = slaveServer.available();
if (client) {
byte buffer[256];
int len = 0;
while (client.available() && len < 256) {
buffer[len++] = client.read();
}
if(len >= 12) { // Minimum Modbus TCP frame length
processModbusRequest(client, buffer, len);
}
}
}
void setup() {
Serial.begin(9600); // Initialize Serial for debugging
// Initialize Ethernet
Ethernet.begin(mac, localIP);
slaveServer.begin();
// Initialize default register values
for(int i = 0; i < 100; i++) {
holdingRegisters[i] = i + 1;
}
}
void loop() {
// Switch between master/slave mode based on timer
if(millis() - modeChangeTimer >= MODE_CHANGE_INTERVAL) {
isMasterMode = !isMasterMode;
modeChangeTimer = millis();
Serial.print("Switching to ");
Serial.println(isMasterMode ? "Master Mode" : "Slave Mode");
}
if(isMasterMode) {
runMasterMode();
} else {
runSlaveMode();
}
}
and my platformio.ini.
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:due]
platform = atmelsam
board = due
framework = arduino
debug_tool = stlink
upload_protocol = stlink
board_upload.offset_address = 0x80000
I have looked into solutions for similar issues, but they don’t seem to work for me.
I am using an Arduino DUE and an ST-Link V2.
Please help, thank you all!