J-Link Command File read successfully.
Processing script file…
J-Link>h
J-Link connection not established yet but required for command.
Connecting to J-Link via USB…FAILED: Cannot connect to J-Link.
J-Link>loadbin .pio\build\nucleo_l476rg\firmware.bin, 0x08000000
J-Link connection not established yet but required for command.
Connecting to J-Link via USB…FAILED: Cannot connect to J-Link.
J-Link>r
J-Link connection not established yet but required for command.
Connecting to J-Link via USB…FAILED: Cannot connect to J-Link.
J-Link>q
It would be great if we could also use the PlatformIO upload function with the remote server. Additionally, it would be helpful to know how to specify the IP address of the remote server in the platformio.ini file, so we don’t have to input it every time we start a debugging session.
Thank you for your help! We look forward to your responses.
I discovered a solution by creating an additional script, extra_script.py, inspired by the post here. The procedure is also described in more detail in the documentation in the Custom Debugging section. Further information can be found in the Advanced Scripting section, especially under Construction Environments.
from os import makedirs
from os.path import isdir, join
from platform import system
Import('env')
board = env.BoardConfig()
upload_protocol = env.subst("$UPLOAD_PROTOCOL")
def _jlink_cmd_script(env, source):
build_dir = env.subst("$BUILD_DIR")
if not isdir(build_dir):
makedirs(build_dir)
script_path = join(build_dir, "upload.jlink")
commands = [
"h",
"loadbin %s, %s" % (source, board.get(
"upload.offset_address", "0x08000000")),
"r",
"q"
]
with open(script_path, "w") as fp:
fp.write("\n".join(commands))
return script_path
env.Replace(
__jlink_cmd_script=_jlink_cmd_script,
UPLOADER="JLink.exe" if system() == "Windows" else "JLinkExe",
UPLOADERFLAGS=[
"ip", "10.0.240.197",
"-device", board.get("debug", {}).get("jlink_device"),
"-speed", env.GetProjectOption("debug_speed", "4000"),
"-if", ("jtag" if upload_protocol == "jlink-jtag" else "swd"),
"-autoconnect", "1",
"-NoGui", "0"
],
UPLOADCMD='$UPLOADER $UPLOADERFLAGS -CommanderScript "${__jlink_cmd_script(__env__, SOURCE)}"'
)
upload_actions = [env.VerboseAction("$UPLOADCMD", "Uploading $SOURCE")]
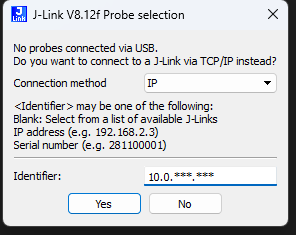
It disables the GUI by setting “-NoGui”, “1”. This prevents the JLink Commander window from appearing, thus making it impossible to manually enter the IP address.
While this custom script from the above solution works as intended, it feels a bit overly complex. Is there a simpler way to overriding or extending the $UPLOADERFLAGS in the platformio.ini file?