I was tinkering with an ATtiny1604 based project with a possible bug. Previously, I had to do a conditional compile to either have my last pin control and LED (on production unit) or generate debug serial output - but not both at once as I had run out of pins.
Not ideal so I went hunting for an alternative.
What if I could use the UPDI pin as a general GPIO pin and have this send serial debug data out.
To achieve this I followed instructions at Tiny UPDI-HV Programmer.
I also found a SendOnlySoftwareSerial library by Nick Gammon that takes the Arduino pin number as the TX pin - on an ATtiny1604, this equates to pin 11. This can be found at Send-only Software Serial.
Here’s a picture of the PlatformIO library setup.

Before I could get the ATtiny1604 to send serial data on any pin, I had to tune the clock as per Internal oscillators and Tuning on Tiny AVR devices.
I hooked it all together and it eventually worked but I had to swap out the UPDI programmer with a serial convertor which seemed a faf as I was using the same serial convertor for my UPDI programmer. I also found that I needed to power reset the target device after HV programming to get it to use the UPDI pin as a GPIO pin for the serial data output.
I modified the original HV UPDI concept slightly to include a 12v source (boost circuit) selectable by pressing a push button while starting the UPDI programming sequence and added a MOSFET on the power out to target. This was controlled by an RC and diode link that generated a positive pulse briefly when the DTR signal from the serial board went back to Vcc after programming was complete.
The net effect is I can run a monitor within PlatformIO on the same port as the programming port and the target device will power on reboot after programming and start using the same port (no need to disconnect anything) for serial data output.
OK the PlatformIO switch over time from upload to monitor means I miss the output from setup() but I can live with that or introduce a delay.
Here’s my PlatformIO.ini
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:ATtiny1604]
platform = atmelmegaavr
board = ATtiny1604
framework = arduino
board_build.f_cpu = 16000000L
upload_speed = 115200
upload_port = COM16
monitor_port = COM16
monitor_speed = 115200
upload_flags =
--tool
uart
--device
ATtiny1604
--uart
$UPLOAD_PORT
--clk
$UPLOAD_SPEED
upload_command = pymcuprog write --erase $UPLOAD_FLAGS --filename $SOURCE
Here’s my sample code…
// ATtiny1604_Serial_on_UPDI_pin
// written for ATtiny1604
// Peter Charles-Jones
// cSpell:includeRegExp CStyleComment
/* MCU clock tuning
Device was tuned to 16M <https://github.com/SpenceKonde/megaTinyCore/blob/master/megaavr/extras/Ref_Tuning.md>
First the device had a bare bones sketch loaded using Arduino IDE and a boot loader burnt at 16M with Millis disabled
Then the MegaTinyTuner example sketch was loaded into target and run with a 1kHz source connected to PA5
Then the boot loader was re-loaded with 16M tuned selected as clock
*/
#include <Arduino.h>
#include <SendOnlySoftwareSerial.h> //
#define BAUD 115200 // serial comms baud rate
SendOnlySoftwareSerial mySerial (11); // set up the serial output stream to PA0 - UPDI pin
//SendOnlySoftwareSerial mySerial (5); // set up the serial output stream to PB1 - test on another pin first
// You can initialise like this: RH_ASK driver(2000, 6, 7); which will transmit on digital pin 7 == PB0 == physical pin 9 on Attiny x14 and receive on digital pin 6 == PB1 == physical pin 8 on Attiny x16 Uses Timer B1.
/* Pin numbering scheme
This core uses a simple scheme for assigning the Arduino pin numbers:
Pins are numbered starting from the the I/O pin closest to Vcc as pin 0
and proceeding counterclockwise, skipping the (mostly) non-usable UPDI pin.
The UPDI pin is then assigned to the last pin number (as noted above, it is possible to read the UPDI pin
(both analog and digital reads work) even if it is not set as GPIO).
We recommend this as a last resort: the UPDI pin always has its pullup enabled when not set as a GPIO pin,
and a signal which looks too much like the UPDI enable sequence will cause undesired operation.*/
// ATtiny1604 / ARDUINO
// _____
// VDD 1|* |14 GND
// (nSS) (AIN4) PA4 0~ 2| |13 10~ PA3 (AIN3)(SCK)(EXTCLK)
// (AIN5) PA5 1~ 3| |12 9 PA2 (AIN2)(MISO)
// (DAC) (AIN6) PA6 2 4| |11 8 PA1 (AIN1)(MOSI)
// (AIN7) PA7 3 5| |10 11 PA0 (nRESET/UPDI)
// (RXD) (TOSC1) PB3 4 6| |9 7~ PB0 (AIN11)(SCL)
// (TXD) (TOSC2) PB2 5~ 7|_____|8 6~ PB1 (AIN10)(SDA)
//
/*
PIN# DESC Pin Name Other/Sp ADC0 ADC1 PTC AC0 AC1 AC2 DAC0 USART0 SPI0 TWI0 TCA(PWM) TCBn TCD0 CCL
0 A0 or SS PA4 AIN4 AIN0 X0/Y0 XDIR SS WO4 WOA LUT0-OUT
1 A1 PA5 VREFA AIN5 AIN1 X1/Y1 OUT AINN0 WO5 TCB0 WO WOB
2 A2 or DAC PA6 AIN6 AIN2 X2/Y2 AINN0 AINP1 AINP0 OUT
3 A3 PA7 AIN7 AIN3 X3/Y3 AINP0 AINP0 AINN0 LUT1-OUT
4 RX PB3 TOSC1 OUT RxD *WO0
5 TX PB2 TOSC2 / OUT TxD WO2
EVOUT1
6 SDA PB1 AIN10 X4/Y4 AINP2 XCK SDA WO1
7 SCL PB0 AIN11 X5/Y5 AINP2 AINP1 XDIR SCL WO0
8 MOSI PA1 AIN1 *TxD MOSI *SDA LUT0-IN1
9 MISO PA2 EVOUT0 AIN2 *RxD MISO *SCL LUT0-IN2
10 SCK PA3 EXTCLK AIN3 *XCK SCK WO3 TCB1 WO
11 UPDI PA0 RESET/ AIN0 LUT1-IN0
UPDI
* alternative pin locations
*/
// put function declarations here:
void system_init();
void setup(){
system_init();
mySerial.begin(BAUD);
mySerial.println(F("\r\n\r\nStarting"));
}
void loop(){
mySerial.println(F("Hello"));
delay(500);
}
/* My subroutines */
/* Interrupt Service Routines */
/* Initialization routines */
void mcu_init(void){
/* On AVR devices all peripherals are enable from power on reset, this
* disables all peripherals to save power. Driver shall enable
* peripheral if used */
/* Set all PORTA pins to low power mode and input disabled */
for (uint8_t i = 0; i < 8; i++)
{ // PA0 - PA7
//*((uint8_t *)&PORTA + 0x10 + i) |= (1 << PORT_PULLUPEN_bp);
uint8_t *port_pin_ctrl = ((uint8_t *)&PORTA + 0x10 + i);
*port_pin_ctrl |= (1 << PORT_PULLUPEN_bp); // define pull up
*port_pin_ctrl = (*port_pin_ctrl & ~PORT_ISC_gm) | PORT_ISC_INTDISABLE_gc; // disable input sensing
}
/* Set all PORTB pins to low power mode and input disabled */
for (uint8_t i = 0; i < 4; i++)
{ // PB0 - PB3 on ATtiny1604
//*((uint8_t *)&PORTB + 0x10 + i) |= (1 << PORT_PULLUPEN_bp);
uint8_t *port_pin_ctrl = ((uint8_t *)&PORTB + 0x10 + i);
*port_pin_ctrl |= (1 << PORT_PULLUPEN_bp); // define pull up
*port_pin_ctrl = (*port_pin_ctrl & ~PORT_ISC_gm) | PORT_ISC_INTDISABLE_gc; // disable input sensing
}
}
void system_init(){ /* system initialization */
mcu_init();
}
A picture of the circuit.

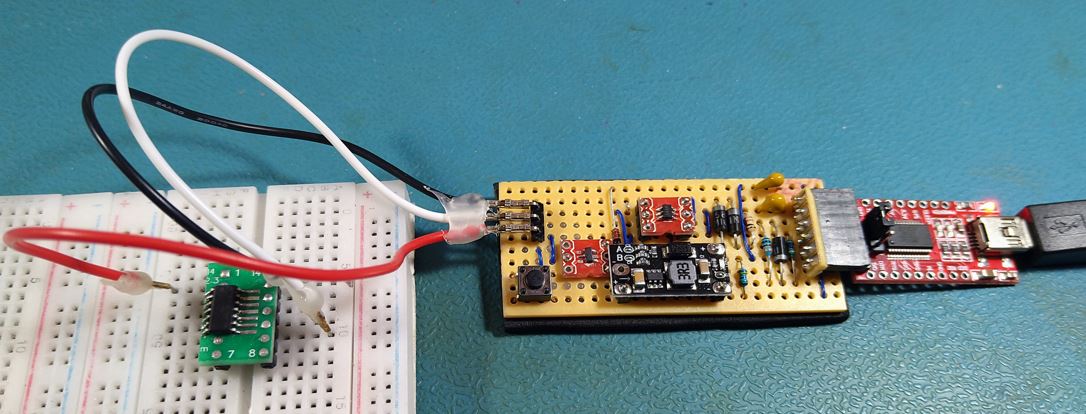
And a photo of the built programmer
I hope this helps anyone stuck for a pin to provide some serial debug output.