I copied the example code from the Seeed Studio webpage and managed to compile and run it with no errors.
But I am unable to find any output that this silly program is meant to be sending to the console?
I just get this…
Writing at 0x0002d9f4... (55 %)
Writing at 0x0003457c... (66 %)
Writing at 0x0003e476... (77 %)
Writing at 0x00043b40... (88 %)
Writing at 0x0004993b... (100 %)
Wrote 237328 bytes (132047 compressed) at 0x00010000 in 1.9 seconds (effective 1005.1 kbit/s)...
Hash of data verified.
Leaving...
Hard resetting via RTS pin...
--- Terminal on /dev/cu.usbmodem2101 | 115200 8-N-1
--- Available filters and text transformations: colorize, debug, default, direct, esp32_exception_decoder, hexlify, log2file, nocontrol, printable, send_on_enter, time
--- More details at https://bit.ly/pio-monitor-filters
--- Quit: Ctrl+C | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H
None of the key combinations work either, so I don’t get a menu with ctrl-t and I cannot quit with ctrl-C.
Sample app on this page
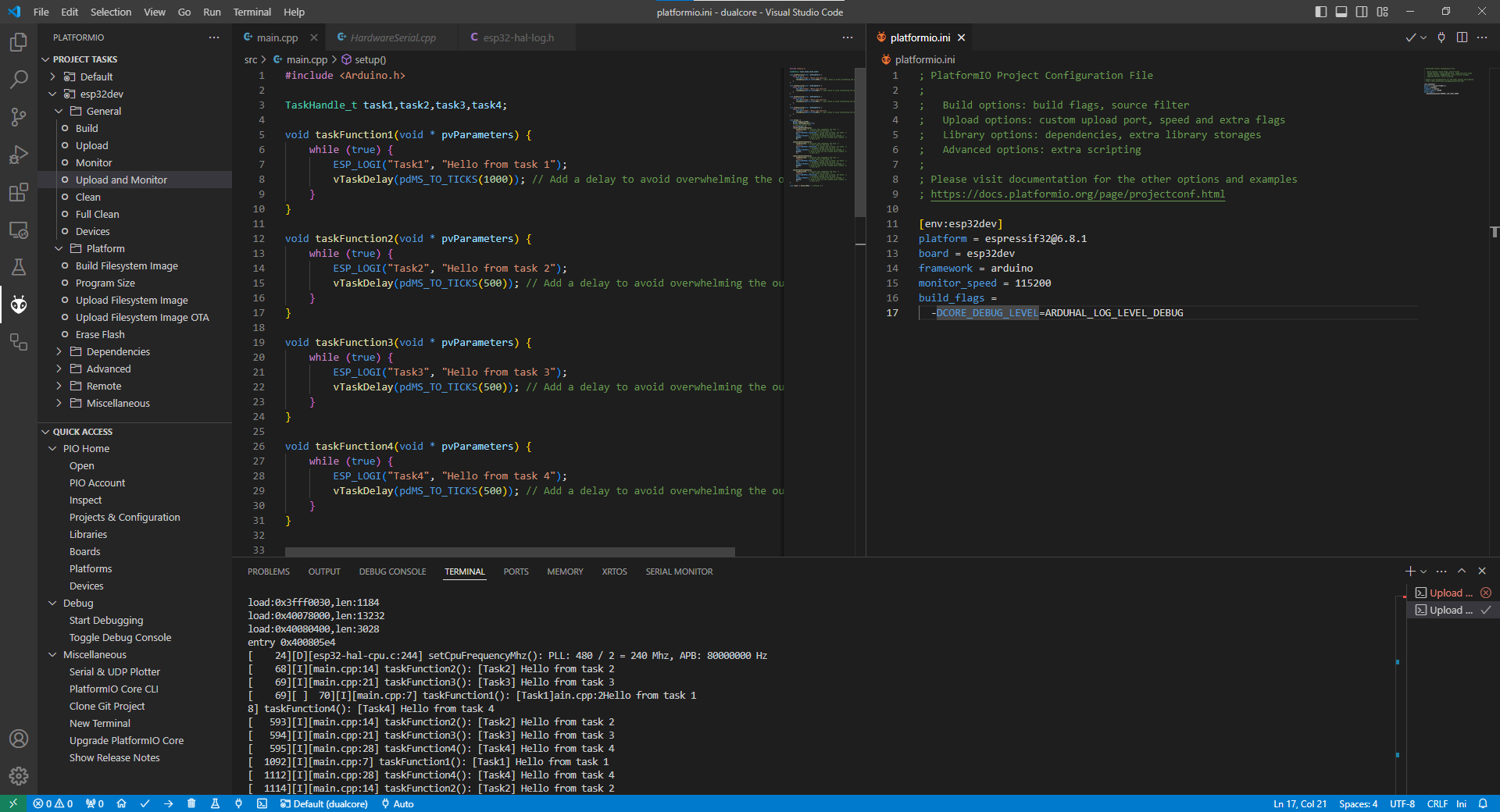
I have also had to add setup() and loop() functions to the sample app to compile it, which might explain it. It refuses to compile if I don’t add them.
/Users/localuser/.platformio/packages/toolchain-xtensa-esp32s3/bin/../lib/gcc/xtensa-esp32s3-elf/8.4.0/../../../../xtensa-esp32s3-elf/bin/ld: .pio/build/seeed_xiao_esp32s3/libFrameworkArduino.a(main.cpp.o):(.literal._Z8loopTaskPv+0x8): undefined reference to `loop()'
/Users/localuser/.platformio/packages/toolchain-xtensa-esp32s3/bin/../lib/gcc/xtensa-esp32s3-elf/8.4.0/../../../../xtensa-esp32s3-elf/bin/ld: .pio/build/seeed_xiao_esp32s3/libFrameworkArduino.a(main.cpp.o): in function `loopTask(void*)':
/Users/localuser/.platformio/packages/framework-arduinoespressif32/cores/esp32/main.cpp:48: undefined reference to `loop()'
Here is the error message if I miss loop out? I am a little pissed since nothing on the Wikipedia page works. Neither example of freeRTOS.