Modul esp32 S3 16Mo flash extern:
https://fr.aliexpress.com/item/32901557709.h…tml?spm=a2g0o.order_list.order_list_main.25.4cd25e5bcq0por&gatewayAdapt=glo2fra
I test the chips in this support:
https://fr.aliexpress.com/item/1005002950744932.html?spm=a2g0o.order_list.order_list_main.39.532a5e5b8APO96&gatewayAdapt=glo2fra
I have a lot of difficulty getting my ESP32 S3 to work properly
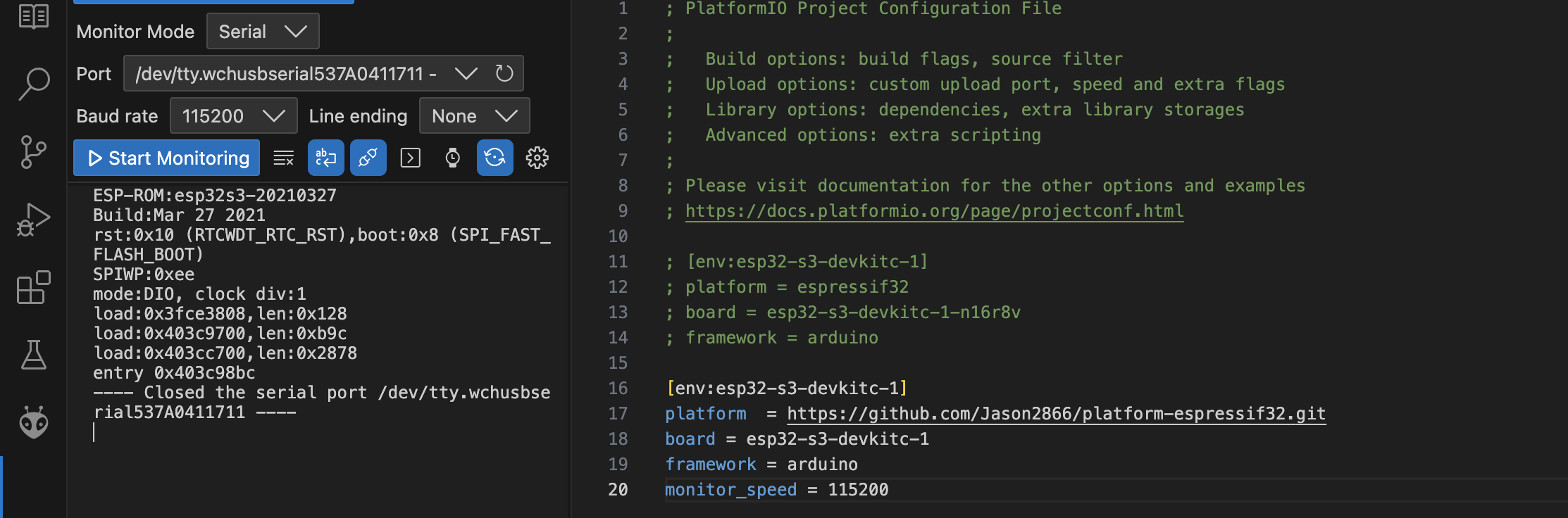
i use Platform IO is the only way to make them work and hack with espressif32@5.3.0 version and use esp32-s3-devkitc-1 board but it not stable at all plus flash and often corrupted the write location and at 0x0 instead of 0x1000 for the USB driver versions CP21... or CH34...
do you by any chance have a better solution? Thanks in advance for your answer and reading :)
<img width="970" alt="Capture d’écran 2023-05-17 à 23 12 49" src="https://github.com/platformio/platform-espressif32/assets/23041016/c61232f8-2f75-42ae-bb8a-3798116088ba">
code:
```cpp
#include <Arduino.h>
#define noAnalogRef // define to remove analogRef test that some cores do not support
//#define noDtostrfTest // define to remove the dtostrf test that some cores do not support
//#define noBvTest // define to remove bv test that some cores do not support
//#define USBserialWait // define to force the main sketch to wait for USB to Serial connection - needed on some native serial boards
//#define noLtoaTest // define to remove Itoa test that some cores do not support
// Uncomment only your specific board, comment the others
//#define BOARD_ATMEGA328
//#define BOARD_LEONARDO
//#define BOARD_STM32F103RB
//#define BOARD_DUE
//#define BOARD_ZERO
//#define BOARD_ESP8266
//#define BOARD_NODEMCU
#define BOARD_ESP32
//#define BOARD_ESP32
//#define BOARD_NRF52
// Arduino ATMEGA328
#ifdef BOARD_ATMEGA328
#define PIN_1 3
#define PIN_2 4
#endif
// Arduino Leonardo
#ifdef BOARD_LEONARDO
#define PIN_1 2
#define PIN_2 3
#define noBvTest
#define USBserialWait
#endif
// Nucleo STM32F103RB - not tested yet
#ifdef BOARD_STM32F103RB
#define PIN_1 12
#define PIN_2 13
#define noAnalog
#define noBvTest
#define noLtoaTest
#endif
// Arduino Due
#ifdef BOARD_DUE
#define PIN_1 2
#define PIN_2 3
#define noDtostrfTest
#define noBvTest
#define USBserialWait
#endif
// Arduino Zero
#ifdef BOARD_ZERO
#define PIN_1 2
#define PIN_2 3
#define noBvTest
#define noDtostrfTest
#define USBserialWait
#define Serial SerialUSB
#endif
// ESP8266
#ifdef BOARD_ESP8266
#define PIN_1 4
#define PIN_2 5
#define PIN_3 12
#endif
// NODEMCU
#ifdef BOARD_NODEMCU
#define PIN_1 4
#define PIN_2 5
#define PIN_3 12
#define noDtostrfTest
#endif
// ESP32
#ifdef BOARD_ESP32
#define PIN_1 38
#define PIN_2 26
#define PIN_3 37
#define noAnalog
#endif
// NRF52/51
#ifdef BOARD_NRF52
#define PIN_1 17
#define PIN_2 18
#define PIN_3 19
#define noDtostrfTest
#define noBvTest
#endif
void speedTest();
void setup()
{
Serial.begin(115200);
#ifdef USBserialWait
while (!Serial) {
; // wait for serial port to connect. Needed for native USB
}
#endif
pinMode(PIN_1, OUTPUT);
pinMode(PIN_2, INPUT);
Serial.println("Speed Test will begin momentarily.");
Serial.println("");
delay(1000);
speedTest();
}
void loop()
{
// Do nothing
}
void speedTest(void)
{
register int i,j;
volatile unsigned char c1,c2;
volatile int v;
volatile long l1,l2;
volatile float f1,f2;
int p,q;
long int r;
unsigned long m,n;
float d, overhead;
char buffer[30];
#ifdef ESP8266
ESP.wdtDisable();
#endif
#ifndef noTitle
Serial.println(F(""));
Serial.println(F("Speed test ESP32 S3 flash extern 16Mo"));
Serial.println(F("----------"));
Serial.print(F("F_CPU = "));
#endif
Serial.print(F_CPU/1000000,DEC);
Serial.println(F(" MHz"));
#ifndef noTitle
Serial.print(F("1/F_CPU = "));
#endif
Serial.print((1000000.0/(float)F_CPU),4);
Serial.println(F(" us"));
delay(800); // Allow the Serial text to be transmitted
#ifndef noTitle
Serial.print(F(" nop (overload) : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<100; i++)
{
for (j=0; j<10000; j++)
{
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
asm volatile ("nop");
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0; // in micro seconds
// Calculate overhead with 'nop' instruction per loop in microseconds
overhead = d - (20.0 * (1000000.0/(float)F_CPU));
d -= overhead;
d /= 20.0; // per instruction
Serial.print (overhead,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" digitalRead : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<2; i++)
{
for (j=0; j<10000; j++)
{
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
digitalRead(PIN_1);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" digitalWrite : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<2; i++)
{
for (j=0; j<10000; j++)
{
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
digitalWrite(PIN_2, HIGH);
digitalWrite(PIN_2, LOW);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" pinMode : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<2; i++)
{
for (j=0; j<10000; j++)
{
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
pinMode(PIN_2, INPUT);
pinMode(PIN_2, OUTPUT);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" multiply byte : "));
#endif
c1 = 2;
c2 = 3;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<20; i++)
{
for (j=0; j<10000; j++)
{
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
c1 *= c2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" divide byte : "));
#endif
c1 = 253;
c2 = 3;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<2; i++)
{
for (j=0; j<10000; j++)
{
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
c1 /= c2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" add byte : "));
#endif
c1 = 1;
c2 = 2;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<20; i++)
{
for (j=0; j<10000; j++)
{
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
c1 += c2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" multiply integer : "));
#endif
volatile int x,y;
x = 2;
y = 3;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<10; i++)
{
for (j=0; j<10000; j++)
{
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
x *= y;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" divide integer : "));
#endif
x = 31415;
y = 3;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<10000; j++)
{
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
x /= y;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" add integer : "));
#endif
x = 1;
y = 3;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<10; i++)
{
for (j=0; j<10000; j++)
{
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
x += y;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" multiply long : "));
#endif
l1 = 2;
l2 = 3;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<2; i++)
{
for (j=0; j<10000; j++)
{
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
l1 *= l2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" divide long : "));
#endif
l1 = 2000000000L;
l2 = 3;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<2000; j++)
{
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
l1 /= l2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" add long : "));
#endif
l1 = 500000000L;
l2 = 123;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<4; i++)
{
for (j=0; j<10000; j++)
{
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
l1 += l2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" multiply float : "));
#endif
f1 = 3.24;
f2 = 1.25;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<2; i++)
{
for (j=0; j<10000; j++)
{
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
f1 *= f2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" divide float : "));
#endif
f1 = 312645.24;
f2 = 1.21;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<2000; j++)
{
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
f1 /= f2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" add float : "));
#endif
f1 = 9876.54;
f2 = 1.23;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<10000; j++)
{
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
f1 += f2;
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" itoa() : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<10000; j++)
{
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
itoa(i,buffer,10);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noLtoaTest
long int l = 314159L;
#ifndef noTitle
Serial.print(F(" ltoa() : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<500; j++)
{
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
ltoa(l,buffer,10);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#endif
#ifndef noDtostrfTest
#ifndef noTitle
Serial.print(F(" dtostrf() : "));
#endif
float d3;
d3 = 3.14159265;
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<2; i++)
{
for (j=0; j<1000; j++)
{
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
dtostrf (d3, 6, 2, buffer);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#endif
#ifndef noTitle
Serial.print(F(" random() : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<2; i++)
{
for (j=0; j<1000; j++)
{
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
r=random(-2147483647,2147483647);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noBvTest
#ifndef noTitle
Serial.print(F(" y |= (1<<x) : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<20; i++)
{
for (j=0; j<10000; j++)
{
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
v |= _BV(12);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#endif
#ifndef noTitle
Serial.print(F(" bitSet() : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<20; i++)
{
for (j=0; j<10000; j++)
{
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
bitSet (v, 12);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noAnalogRef
#ifndef noTitle
Serial.print(F(" analogReference() : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<20; i++)
{
for (j=0; j<10000; j++)
{
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
analogReference (EXTERNAL);
analogReference (DEFAULT);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#endif
#ifndef noAnalog
#ifndef noTitle
Serial.print(F(" analogRead() : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<1000; j++)
{
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
analogRead (0);
analogRead (1);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" analogWrite() PWM : "));
#endif
// Using pin 13 (system led) for output.
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<10000; j++)
{
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
analogWrite (PIN_2, 100);
analogWrite (PIN_2, 200);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#endif
#ifndef noTitle
Serial.print(F(" delay(1) : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<100; j++)
{
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
delay(1);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" delay(100) : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<2; j++)
{
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
delay(100);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#if defined(ESP8266)
ESP.wdtDisable();
#endif
#ifndef noTitle
Serial.print(F(" delayMicroseconds(2) : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<30; i++)
{
for (j=0; j<1000; j++)
{
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
delayMicroseconds(2);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#ifndef noTitle
Serial.print(F(" delayMicroseconds(5) : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<5; i++)
{
for (j=0; j<1000; j++)
{
//Serial.println ("Working");
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
delayMicroseconds(5);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
#if defined(ESP8266)
ESP.wdtDisable();
#endif
#ifndef noTitle
Serial.print(F(" delayMicroseconds(100) : "));
#endif
delay(70); // Allow the Serial text to be transmitted
m=millis();
for (i=0; i<1; i++)
{
for (j=0; j<1000; j++)
{
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
delayMicroseconds(100);
}
}
n=millis();
d = ((float)n - (float)m) / ((float)i * (float)j);
d *= 1000.0;
d -= overhead;
d /= 20.0;
Serial.print (d,3);
Serial.println (F(" us"));
Serial.println(F("-----------"));
}
```