Hello, world!
I’ve been building robots for about 11 years. My latest thing is trying to make a really great actuator for all my projects (and all of yours!)
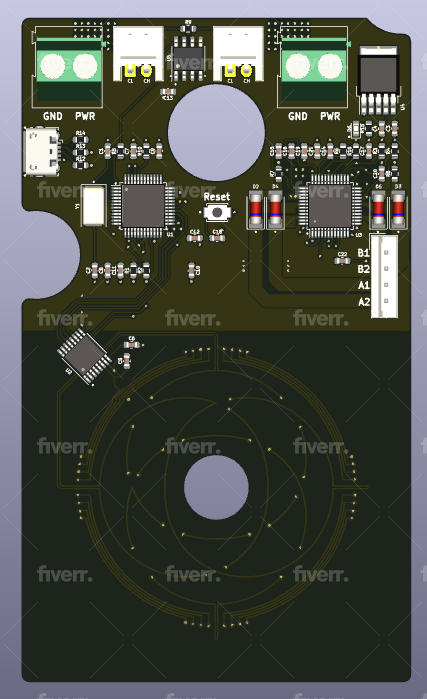
The plan is:
- a harmonic drive (zero backlash),
- an IPS2200 resolver (rotation sensor),
- a TMC2130 stepper driver,
- all tied together wtih an STM32F103CB MCU.
The housing: https://www.instagram.com/p/CNA8_4vrAYI/
The MCU’s 16 bit ADC can read the absolute position of the sensor. My old method was an AS5147 magnet sensor with 12 bits, so this is a big step up.
With the built in CAN bus I hope to daisy-chain the actuators. Combined with the through-hole gearbox I should be able to completely enclose the wiring in a robot arm with no dangly bits.
I got a very helpful guy on Fiverr to do the PCB layout. PCBWay is doing the board assembly. I have the gearbox and the 3D printed housing, so now I’m just waiting on delivery. I’m posting here because I’m looking for people with deep know how of STM, stepper control, CANbus, etc to go faster. I’ve knocked together a basic stepper firmware but I’m not an expert by any stretch. Imagine what we could do together!