I wasn’t able to reproduce easily on a simple project but on all of my larger projects this seems to occur. The simplest I have is this one:
#include <Arduino.h>
#include <ESP8266WiFi.h>
#include <AsyncMqttClient.h>
#include <ESP8266mDNS.h>
#include <ESP8266HTTPClient.h>
#include <OneWire.h>
#include <DallasTemperature.h>
#include <NTPClient.h>
#include <WiFiUdp.h>
#include <ESP8266HTTPUpdateServer.h>
#include <ESP8266WebServer.h>
#include <ArduinoOTA.h>
#include <ArduinoJson.h> // required for settings file to make it readable
#include <ESPmanager.h>
#include <EEPROM.h>
#include "Settings.h"
extern "C" {
#include "user_interface.h"
}
//timer objects and variables
os_timer_t myTimer;
bool tickOccured;
ESP8266WebServer HTTP(80);
const char * defaultSSID = "ssid";
const char * defaultPSK = "password";
ESPmanager settings(HTTP, SPIFFS, "ESPManager", defaultSSID , defaultPSK);
#ifdef _MQTT_
AsyncMqttClient mqttClient;
#endif
// Data wire is plugged into pin 2 on the Arduino
#define ONE_WIRE_BUS 14
// Setup a oneWire instance to communicate with any OneWire devices
// (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
#define TEMPERATURE_PRECISION 12
int numberOfDevices; // Number of temperature devices found
DeviceAddress tempDeviceAddress; // We'll use this variable to store a found device address
WiFiUDP ntpUDP;
uint32_t CustomMillis = 0;
// You can specify the time server pool and the offset (in seconds, can be
// changed later with setTimeOffset() ). Additionaly you can specify the
// update interval (in milliseconds, can be changed using setUpdateInterval() ).
NTPClient timeClient(ntpUDP, "ntp2.is.co.za");
//variables
uint32_t stamp = 0;
uint32_t stamp1 = 0;
uint32_t stamp2 = 0;
uint32_t stamp3 = 0;
uint32_t stamp4 = 0;
uint32_t stamp5 = 0;
float temperature = 0;
byte hours = 0;
byte minutes = 0;
byte seconds = 0;
byte TempLimit = 100;
byte TempLimitMem = 100;
byte RelayState = 0;
byte Onhours = 6;
byte Onminutes = 1;
byte Onseconds = 0;
byte keep = 0;
byte CommandRec = 0;
byte mqttconnected = 0;
void setup() {
pinMode(12, OUTPUT);
digitalWrite(12,LOW);
pinMode(13, INPUT);
beginEEPROM();
SPIFFS.begin();
settings.begin();
HTTP.begin();
//WifiSetup();
MQTTPreSetup();
MQTTsetup();
sensors.begin();
sensors.setWaitForConversion(FALSE);
numberOfDevices = sensors.getDeviceCount();
for(int i=0;i<numberOfDevices; i++)
{
// Search the wire for address
if(sensors.getAddress(tempDeviceAddress, i))
{
// set the resolution to TEMPERATURE_PRECISION bit (Each Dallas/Maxim device is capable of several different resolutions)
sensors.setResolution(tempDeviceAddress, TEMPERATURE_PRECISION);
}
}
timeClient.begin();
timeClient.setTimeOffset(7200);
user_init();
stamp = millis();
stamp1 = CustomMillis;
stamp2 = stamp2 + 250;
stamp3 = stamp2 + 500;
}
void loop() {
uint32_t temp = RelayState;
HTTP.handleClient();
settings.handle();
TempRequest();
UpdateTime();
if(mqttconnected) PublishMessage();
TurnOffKettle();
KeepTemp();
TurnOnKettle();
delay(0);
if(temp != RelayState){
stamp4 = CustomMillis;
}
}
//wifi setup
void WifiSetup(){
WiFi.persistent(false);
WiFi.mode(WIFI_STA);
WiFi.begin("ssid", "password");
while (WiFi.status() != WL_CONNECTED) {
delay(500);
}
}
//mqtt setup
void MQTTPreSetup(){
#ifdef _MQTT_
mqttClient.onConnect(onMqttConnect);
mqttClient.onDisconnect(onMqttDisconnect);
mqttClient.onMessage(onMqttMessage);
#endif
}
void MQTTsetup(){
#ifdef _MQTT_
mqttClient.setServer("m.cloudmqtt.com", 111111);
mqttClient.setKeepAlive(5).setCleanSession(false).setWill("topic/online", 2, true, "no").setCredentials("user", "pass").setClientId("myDevice");
#ifdef _DEBUG_
Serial.println("Connecting to MQTT...");
#endif
mqttClient.connect();
#endif
}
#ifdef _MQTT_
void PublishMessage(){
if(CustomMillis - stamp3 >= 1000){
byte first2 = temperature;
byte second2 = (byte) ((temperature - first2) * 100);
char mess[13] = {3,CommandRec,hours,minutes,seconds,first2,second2,RelayState,TempLimit,keep,Onhours,Onminutes,Onseconds};
String Stringmess = "";
for(int i = 0; i < 13 ; i ++ ){
Stringmess.concat(mess[i]);
}
CommandRec = 0;
uint16_t packetIdPub2 = mqttClient.publish("d/kettle0", 2, true, &Stringmess[0],13);
stamp3 = CustomMillis;
}
}
void onMqttConnect(bool sessionPresent) {
mqttconnected = 1;
uint16_t packetIdSub = mqttClient.subscribe("s/kettle0", 2);
}
void onMqttDisconnect(AsyncMqttClientDisconnectReason reason) {
mqttconnected = 0;
ESP.restart();
}
void onMqttMessage(char* topic, char* payload, AsyncMqttClientMessageProperties properties, size_t len, size_t index, size_t total) {
byte CheckTopic = 1;
String MatchTopic = "s/kettle0";
for(int i = 0 ; i < strlen(topic) ; i++){
if(topic[i] != MatchTopic[i]) CheckTopic = 0;
}
if(CheckTopic && payload[0] == 1){
CommandRec = 1;
RelaySwitch(12,keep);
}else if(CheckTopic && payload[0] == 0) {
CommandRec = 1;
if(keep == 1) keep = 0;
digitalWrite(12,LOW);
RelayState |= 1;
RelayState ^= 1;
}else if(CheckTopic && payload[0] == 2){
CommandRec = 1;
RelaySwitch(12,1);
}else if(CheckTopic && payload[0] == 3){
CommandRec = 1;
keep = payload[1];
EEPROM.write(3,keep);
EEPROM.commit();
}else if(CheckTopic && payload[0] == 4){
CommandRec = 1;
Onhours = payload[1];
Onminutes = payload[2];
Onseconds = payload[3];
EEPROM.write(0, Onhours);
EEPROM.write(1, Onminutes);
EEPROM.write(2, Onseconds);
EEPROM.commit();
}else if(CheckTopic && payload[0] == 5){
CommandRec = 1;
TempLimit = payload[1];
TempLimitMem = TempLimit;
EEPROM.write(4, TempLimit);
EEPROM.commit();
}else if(CheckTopic && payload[0] == 9){
CommandRec = 1;
ESP.restart();
}
}
#endif
// start of timerCallback
void timerCallback(void *pArg) {
CustomMillis++;
} // End of timerCallback
void user_init(void) {
os_timer_setfn(&myTimer, timerCallback, NULL);
os_timer_arm(&myTimer, 1, true);
} // End of user_init
//request the temperature every 1 second
void TempRequest() {
if (CustomMillis - stamp1 >= 1000) {
temperature = sensors.getTempCByIndex(0);
sensors.requestTemperatures();
stamp1 = CustomMillis;
}
}
//update the time every 10 seconds
void UpdateTime(){
if (CustomMillis - stamp2 >= 1000) {
uint32_t tempstamp = CustomMillis;
timeClient.forceUpdate();
hours = timeClient.getHours();
minutes = timeClient.getMinutes();
seconds = timeClient.getSeconds();
stamp2 = CustomMillis;
}
}
void TurnOffKettle(){
if(((CustomMillis - stamp4 >= 300000) && (RelayState & 1)) || (temperature >= TempLimit)){
digitalWrite(12,LOW);
TempLimit = TempLimitMem;
RelayState |= 1;
RelayState ^= 1;
}
}
void TurnOnKettle(){
if(hours == Onhours && minutes == Onminutes && seconds == Onseconds){
TempLimitMem = TempLimit;
TempLimit = 100;
if(keep == 2) RelaySwitch(12,0);
else RelaySwitch(12,1);
}
}
void KeepTemp(){
if(keep == 1 && temperature < TempLimit - 10 && (RelayState & 1) == 0 && (CustomMillis - stamp5 <= 1800000)){
digitalWrite(12,HIGH);
RelayState |= 1;
stamp4 = CustomMillis;
}else if(CustomMillis - stamp5 >= 1800000){
if(keep != 0){
digitalWrite(12,LOW);
keep = 0;
TempLimit = TempLimitMem;
RelayState |= 1;
RelayState ^= 1;
}
}
}
void RelaySwitch(byte pin, byte keeper){
digitalWrite(pin,HIGH);
RelayState |= 1;
keep = keeper;
stamp4 = CustomMillis;
if(keeper == 1){
stamp5 = CustomMillis;
}
}
void beginEEPROM(){
EEPROM.begin(10);
Onhours = EEPROM.read(0);
Onminutes = EEPROM.read(1);
Onseconds = EEPROM.read(2);
keep = EEPROM.read(3);
TempLimit = EEPROM.read(4);
}
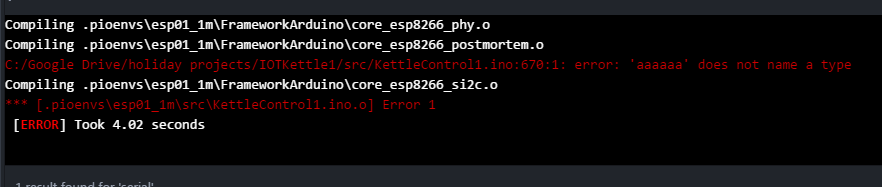
aaaaaa
I get the error:
This obvious error is actually on line 336 at the very end but the error log indexes it beyond the last line of code for a some reason.