I have not seen anyone else do it with a Teensy 4/4.1 yet. The Teensy 3s are a bit easier to mod since they had debug pads on the board, but you still needed to remove the same chip. It requires good soldering skills, hot air station, microscope, magnet wire, etc. I am still in the early stages of the modification so it is a mess. I am waiting on a pcb to be made which should make this presentable.
Here are some pics.
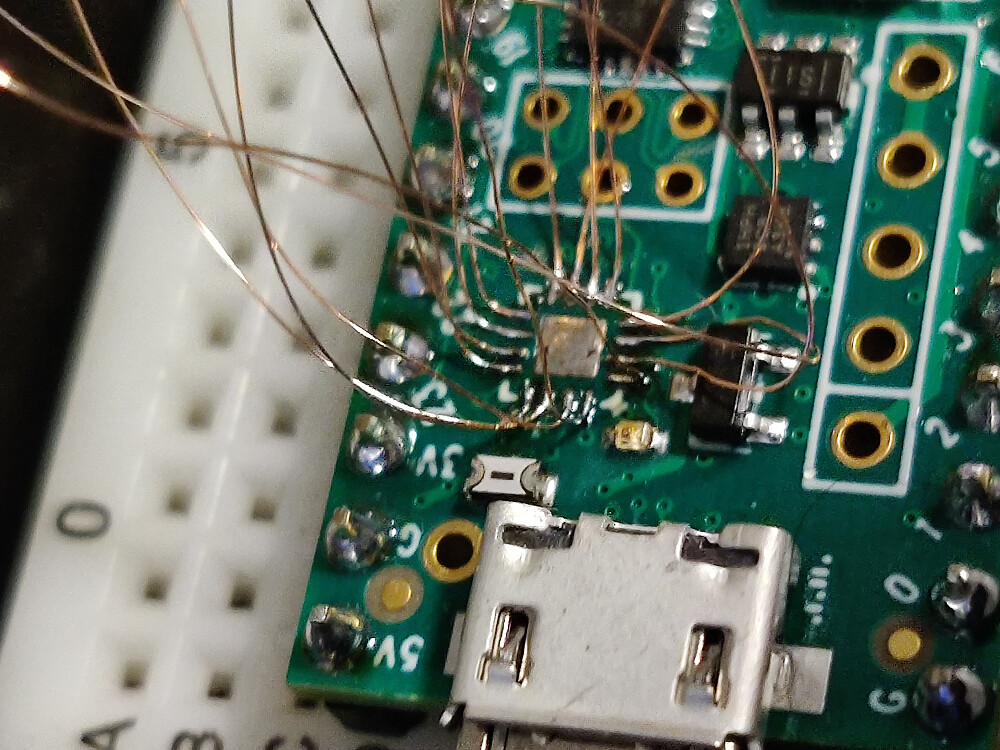
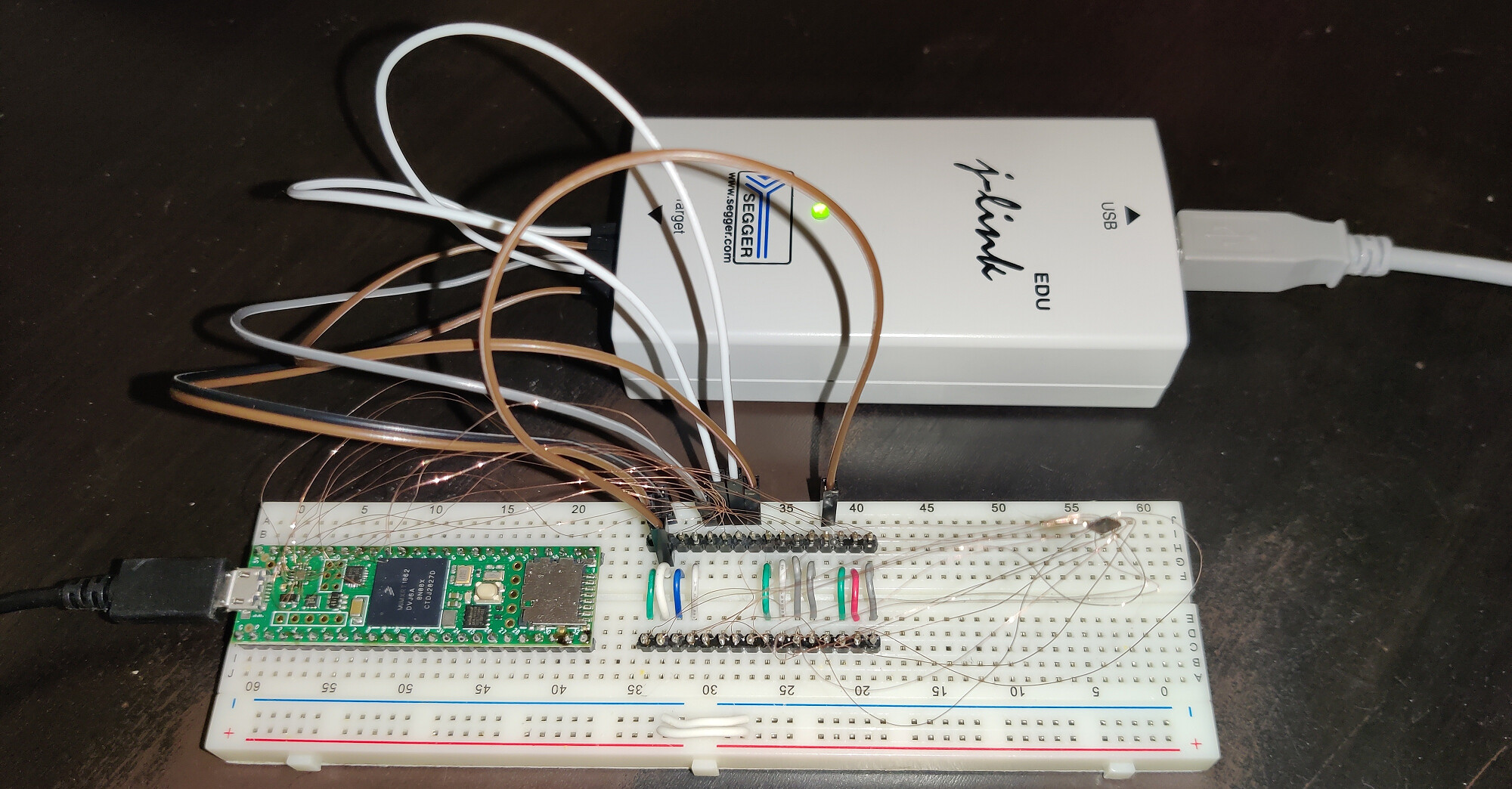
The mod requires removing the MKL02Z32VFG4 to access the JTAG pads, connecting those to a J-Link, and reconnecting the chip to the other (non JTAG) pads to keep everything happy… And yes… that is the MKL02Z32VFG4 floating off to the right.
@datkins47 Let me know if you need guidance, if you decide to take it on.