Careful - that’s a different Arduino core.
On the PlatformIO side there are currently 3 platforms that support programming the Pico. A platform is basically a set of board definitions and Python logic to build particular frameworks or enable specific features:
- https://github.com/platformio/platform-raspberrypi is the official PlatformIO-staff made PlatformIO integration for the Pi Pico (and related). It supports only the ArduinoCore-mbed as the Arduino core. This is different to Earle Philhower’s https://github.com/earlephilhower/arduino-pico you have linked to – it does not support selecting that as the Arduino core implementation.
- https://github.com/Wiz-IO/wizio-pico is a whole self-developed integration made by WizIO, and it supports
- the Pico SDK (version 1.2.0) (see https://github.com/Wiz-IO/framework-wizio-pico)
- a custom-made Arduino core https://github.com/Wiz-IO/framework-wizio-pico/tree/main/arduino
- https://github.com/maxgerhardt/platform-raspberrypi: My extension of the official integration, adding support for Earle Philhower’s core (and a bunch of other stuff like Picoprobe debugging, filesystem upload). (Currently WIP, will then be merged back.)
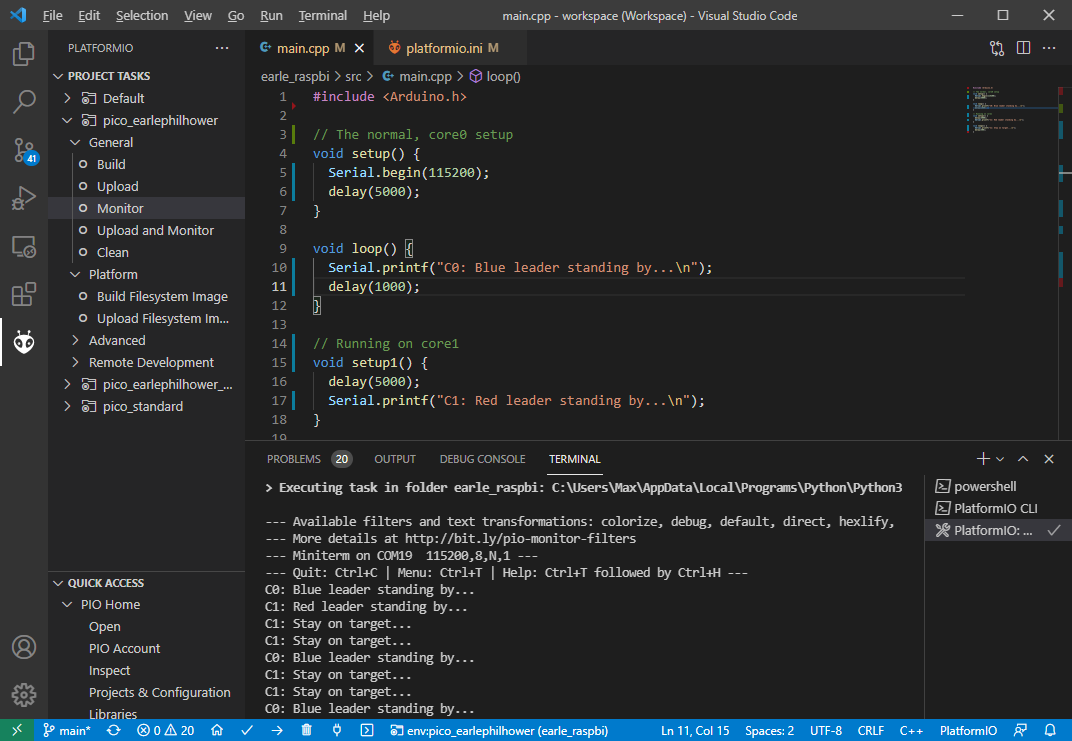
Since you seem to be wanting to work with Earle Philhower’s Arduino core (which incidentally also supports programming against the raw Pico SDK), you should take a look at the example project GitHub - maxgerhardt/pio-pico-core-earlephilhower-test: Test firmware that uses the earlephilhower Arduino core.. The standard Multicore.ino code works just fine with it.