ok so i added debug_init_cmds as follows in PIO.ini, leaving out $LOAD_CMDS
[env:debug]
debug_tool = custom
debug_server =[
debug_port = 127.0.0.1:12555
build_mode = debug
debug_load_mode = manual
debug_init_cmds =
target extended-remote $DEBUG_PORT
$INIT_BREAK
python output:
INFO:pyedbglib.hidtransport.hidtransportbase:Manufacturer: ATMEL
INFO:pyedbglib.hidtransport.hidtransportbase:Product: mEDBG CMSIS-DAP
INFO:pyedbglib.hidtransport.hidtransportbase:Serial Number: MICROUPDIPROGRAMMERX
INFO:pymcuprog.deviceinfo.deviceinfo:Looking for device atmega4809
INFO:pymcuprog.nvm:UPDI baud rate: 900000bps
INFO:root:Event recived
PC: 529
INFO:root:Recived break event
INFO:root:No event
Waiting for GDB session 127.0.0.1:12555
Connected by ('127.0.0.1', 49974)
-> $qSupported#37
<- +
INFO:root:AVR running state False
Supported
<- $PacketSize=1000#f1
INFO:root:No event
-> ++$?#3f
<- +
INFO:root:AVR running state False
<- $S00#b3
INFO:root:No event
-> +$Hc-1#09
<- +
INFO:root:AVR running state False
<- $#00
INFO:root:No event
-> +$qC#b4
<- +
INFO:root:AVR running state False
C
<- $#00
INFO:root:No event
-> +$qOffsets#4b
<- +
INFO:root:AVR running state False
Offsets
<- $Text=000;Data=000;Bss=000#24
INFO:root:No event
-> +$Hg0#df
<- +
INFO:root:AVR running state False
<- $#00
INFO:root:No event
-> +$g#67
<- +
INFO:root:AVR running state False
['0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x6a', '0x4e', '0xce', '0x3f', '0x20', '0x0', '0x0', '0x0', '0x0', '0x0', '0x0', '0x60', '0x38', '0x4e', '0xcd', '0x3f', '0x20', '0x0']
['0x21']
['0xcd', '0x3f']
<- $00000000000000000000000000006a4ece3f2000000000000060384ecd3f200021cd3f#c2
INFO:root:No event
-> +$p22#d4
<- +
INFO:root:AVR running state False
529
0x211
0x422
00000422
22040000
<- $22040000#88
INFO:root:No event
-> +$!#21
<- +
INFO:root:AVR running state False
<- $#00
INFO:root:No event
-> +$qSymbol::#5b
<- +
INFO:root:AVR running state False
Symbol::
<- $OK#9a
INFO:root:No event
-> +$m5de,40#fb
<- +
INFO:root:AVR running state False
5de
40
0
INFO:root:Reading from address 0x0005DE
bytearray(b'!\xf4\xe5\x01"\x96\xf5\x01\x11\x81\x00\xe0\xdc\xcf\xea\xe0\xee\x16\xf1\x04\t\xf4\xbb\xc0\xf0\xe1\xef\x16\xf1\x04\t\xf0m\xc0\xe7\xcfx\xe0\xe7.\xf1,\x81,\x91,\xa1,`\xe1\xb6.p\xc0?\xe91\x0f:1(\xf49\xea')
21f4e5012296f501118100e0dccfeae0ee16f10409f4bbc0f0e1ef16f10409f06dc0e7cf78e0e72ef12c812c912ca12c60e1b62e70c03fe9310f3a3128f439ea
<- $21f4e5012296f501118100e0dccfeae0ee16f10409f4bbc0f0e1ef16f10409f06dc0e7cf78e0e72ef12c812c912ca12c60e1b62e70c03fe9310f3a3128f439ea#ed
INFO:root:No event
-> +
INFO:root:No event
-> $qRcmd,7265736574#37
<- +
INFO:root:AVR running state False
Rcmd,7265736574
<- $#00
INFO:root:No event
-> +$k#6b
<- +
INFO:root:AVR running state False
C:\Users\Paul\Downloads\pyAVRdbg-master\pyAVRdbg-master>
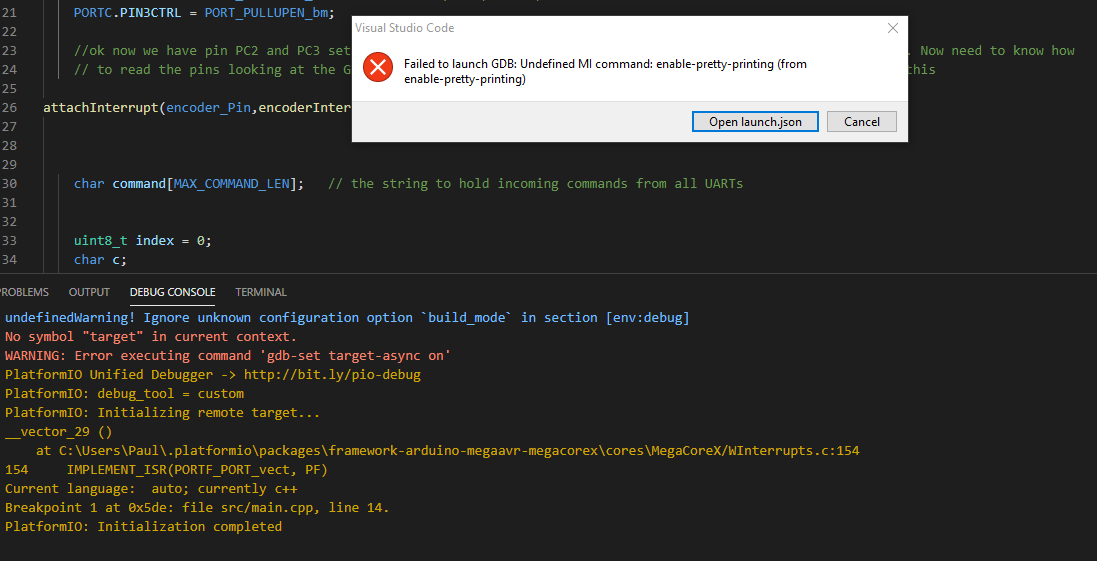
and from the PIO UI